-
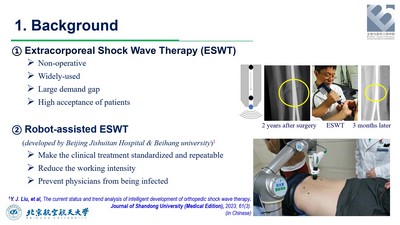
Design and Analysis of an End Effector with Dual RCM Mechanism for Robotic Extracorporeal Shock Wave Therapy in Orthopedics
Wang, Boyang/Guo, Anyi/Liu, Yan/Hou, Kedong/Liu, Yajun/Liu, Wenyong
-
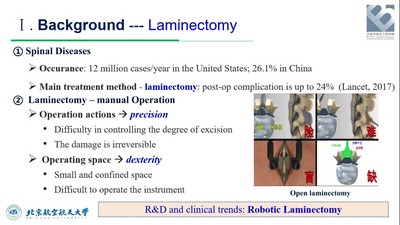
A 2-DOFs Planar Grinding End-Effector for Robotic Laminectomy
Duan, Wei/Ji, Xuquan/Hu, Lei/Liu, Wenyong
-
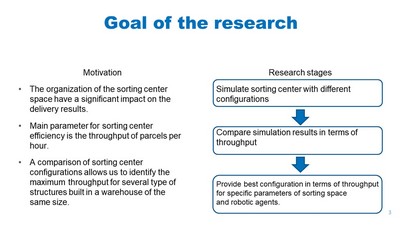
Sorting space configuration comparison for the multi-agent robotic sorting system
Starostenko, Aleksey/Kozin, Filipp/Gorbachev, Roman/Khvostikova, Olga/Gerasimov, Sergei/Zakharova, Ekaterina/Zaripov, Mikhail/Davydenko, Egor/Gonnochenko, Aleksei
-
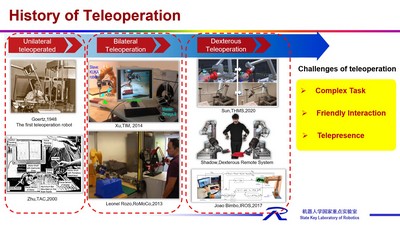
Recognition of Dynamic Grasping Motion through Feature Extraction for Teleoperation
Dai, Yanping/Chen, Wenyuan/Xi, Ning/Wang, Wenxue
-
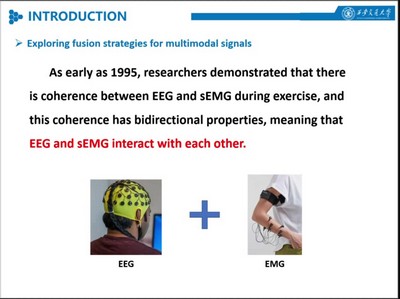
An Approach for Upper Limb Movement Intention Recognition Using EEG and sEMG Fusion based on the MCPSA-CIIM
Zhang, Weiming/Zhang, Xiaodong/Xu, Cheng/Zhou, Guchuan/Zhang, Teng/Wang, Yu
-
Equilibrium Theory based Power Sharing Allocation Algorithm for Wireless Capsule Endoscopy Relays
Li, Ye/Zhao, Jiawei/Wei, Junyi/Feng, Lin
-
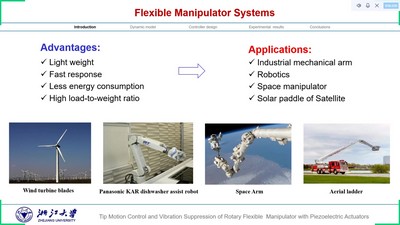
Tip Motion Control and Vibration Suppression of Rotary Flexible Manipulator with Piezoelectric Actuators
Song, Shuaili/Gao, Yingying/Zhu, Xiaocong/Cao, Jian
-
Research on Dermatological Classification Algorithm Based on the Fusion Model
Zhang, Chenjie/Wang, Shuai/Zhang, Yu/Hu, Hanping
-
Garbage Image Classification Algorithm Based on Swin Transformer
Hu, Hanping/Wang, Shuai/Zhang, Chenjie/Pan, Yue