-
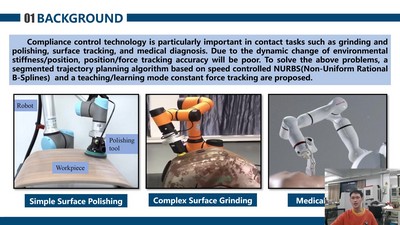
A Constant Force Tracking Strategy for Complex Surface Robots Fused with NURBS Speed Planning and Teaching/Learning Mode
Duan, Jinjun/Cui, Kunkun/Guo, An/Wang, Lingyu/Bin, YiMing/Wan, Minhong/Huang, Qiulan
-
Dynamic Modeling Method of Six-axis Force/Torque Sensors Based on IGWO-GRU
Xue, Yufei/Gao, Lifu/Cao, Huibin/Sun, Yuxiang
-
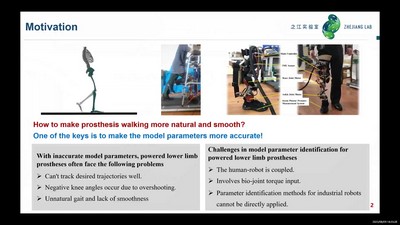
Modeling and Parameter Identification for Human-robot Coupled Systems in Powered Lower Limb Prostheses
Huang, Yongshan/Wang, Xin/Liang, Dingkun/Xiong, Jiaming/Xie, Anhuan/Gu, Jason
-
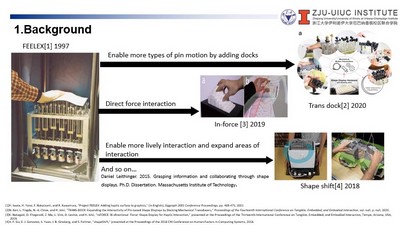
Application of Compliant control in Pin-Based Shape Display for Compliant Physical Interaction between Human and Machine
Huang, Yizhou/Xiao, Songjie/Shi, Yunze/Li, Haoyu/Yang, Liangjing
-
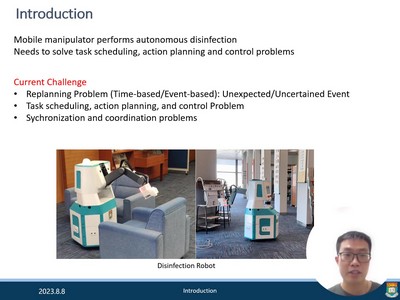
Integrated Task Scheduling, Action Planning and Control for Autonomous Disinfection by a Mobile Robotic Manipulator
Ye, Jiajie/Sheng, Yongji/Wang, Siyu/Ma, Ye/Kwok, Chun/Wang, Qingyang/Xi, Ning
-
Acoustic 3D Shape Reconstruction of Zygomatic Bone for Non-Invasive Spatial Registration
Han, Runzhe/Yuan, Mengning/Jie, Bimeng/He, Yang/Zhu, Jiayu/Zhang, Runshi/Wang, Junchen
-
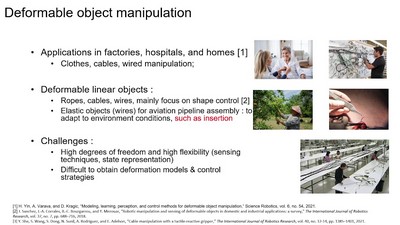
Fusing Vision and Force : A Framework of Reinforcement Learning for Elastic Peg-in-Hole Assembly
Dang, Renjun/Hou, Zhimin/Yang, Wenhao/Chen, Rui/Xu, Jing
-
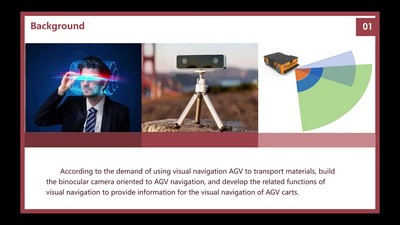
Research on feature point localization technology based on binocular vision
Liu, Lei/Jun, Wei/Mu, Qingsheng
-
Towards Autonomous Robotic Ultrasound Scanning Using the Reinforcement Learning-Based Volumetric Data Navigation Method
Shen, Cuifeng/Deng, Zhaokun/Wang, Jinzhi/Wang, Shuangyi/Chen, Chen