-
Distributed Underwater Jet Propulsion Based Maneuverable Rudderless AUV: Design Fabrication and Testing
Wang, Zhangtao/Wu, Wenle/Wan, Yi/Wang, Xingjian/Wang, Shaoping
-
Research on Trajectory Planning and Control of Hydraulic Stacking Robot
Li, Deran/Cao, Jian/Li, Feiteng/Zhu, Xiaocong
-
Trajectory Planning of Robot End-Effector Position and Orientation Based on Cubic Spline
Liu, Yang/Du, Zhenjun/Liu, Mingmin/Tao, Tao Yongliang/Li, Chengpeng
-
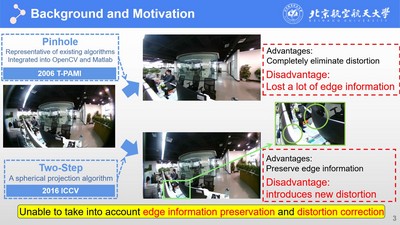
A New Method for WFOV Camera Distortion Correction
Chen, Qian/Wei, Zhaoxiang/Tan, XinYuan/Shen, Hongbin/Meng, Cai
-
A Human-machine interactive simulation environment for intelligent analysis of human factors reliability
Wang, Chunlei/Wang, Xiao
-
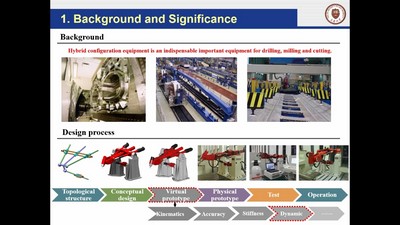
Dynamic modeling of the hybrid manipulator
Chen, Weifeng/Liu, Haitao/Li, Guangxi/Bai, Yujie
-
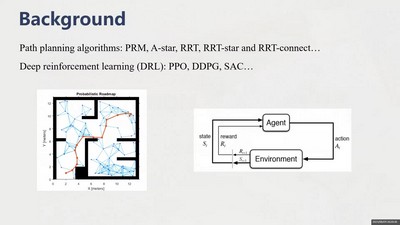
Deep Reinforcement Learning Integrated RRT Algorithm for Path Planning
Liu, Huashan/Gu, Yuqing/Li, Xiangjian/Xiao, Xinjie
-
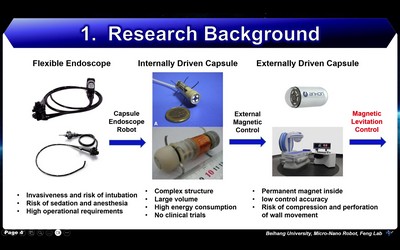
The Control System for 5-DOF Magnetic Levitation Capsule Robot
Zeng, Zijin/Wang, Fengwu/Zhao, Jiawei/Wang, Chutian/Li, Chan/Feng, Lin
-
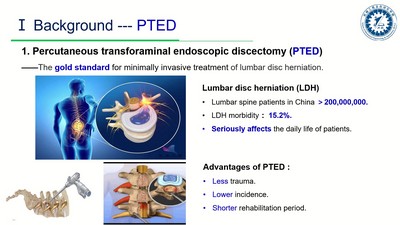
Robotic Positioning in Percutaneous Transforaminal Endoscopic Discectomy Based on X-ray Image and DLT Algorithm
Zhang, Tianyang/Ji, Xuquan/Zhu, Yuanyuan/Zhang, Jian/Geng, Baoduo/Xue, Yumei/Hu, Lei/Liu, Wenyong