-
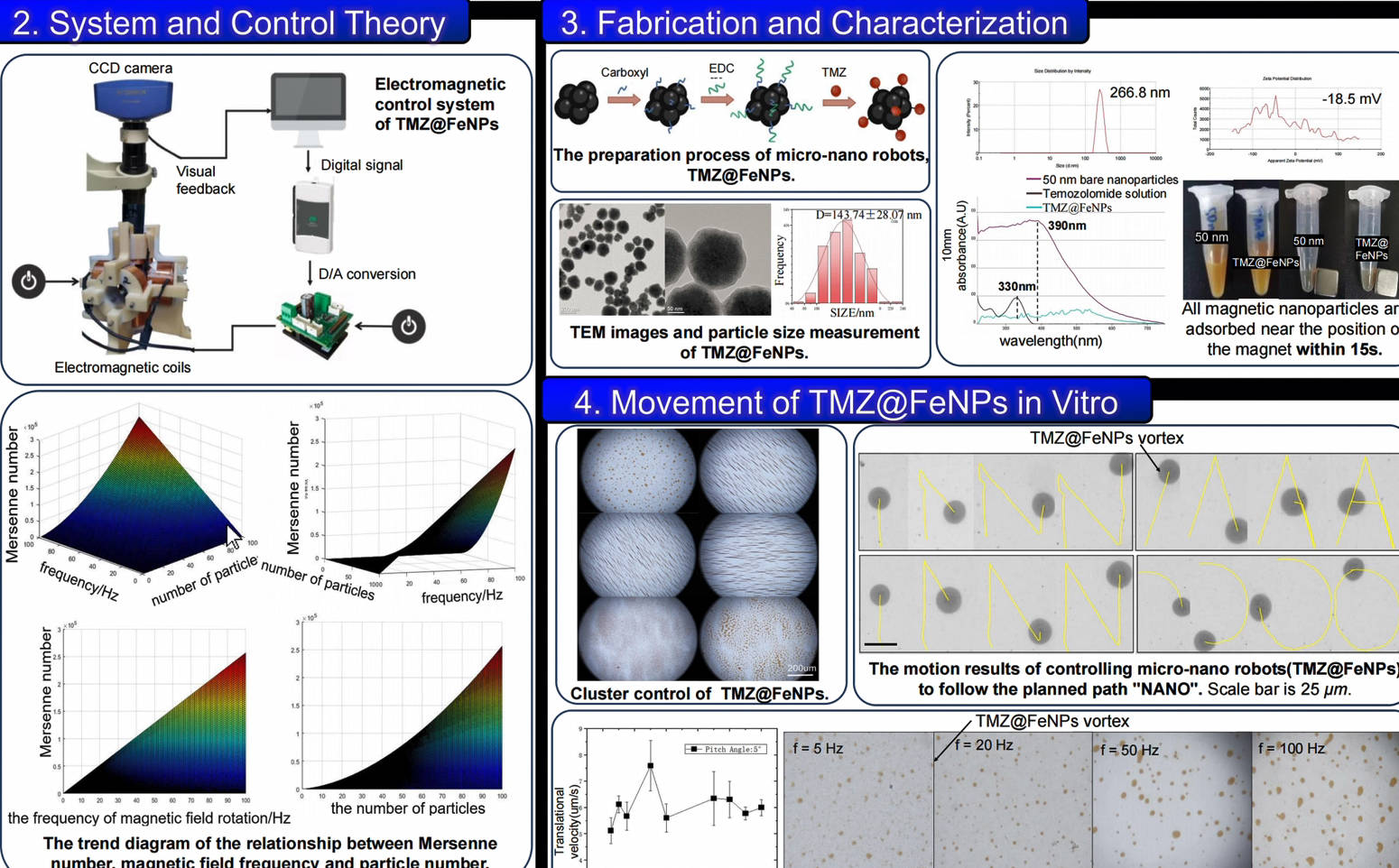
Magnetically Controlled Nanorobotic Swarm for the Glioma Therapy
Li, Chan/Hu, Zihan/Sun, Hongyan/Wang, Chutian/Zeng, Zijin/Feng, Lin
-
The Impact of Commercial Chatbots on Customer Relationship Quality: The Mediating Role of Social Perceptions and Psychological Distance
Tu, Yangjun/Xiao, Lijun/Liu, Wei/Yang, Zhi
-
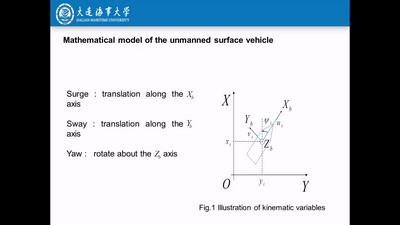
Adaptive Path Following Control Based on Nonlinear Disturbance Observer for a Six Thrusters AUV
Ji, Daxiong/Xu, Minghui/Wang, Xinwei/Ye, Zhangying
-
Type synthesis of 5-DOF redundantly actuated parallel robots for super-large components with complicated surfaces
Jiang, Bingshan/Kong, Lingyu/Xie, Anhuan/Wang, Xin/Huang, Guanyu/Zhang, Lan/Zhao, Pengyu/Tian, Xinyu
-
Design and development of the dual-arm robot DARO
Liu, Yun/Huang, Qiulan/Zhang, Pu/Yan, Mindong/Liang, Dingkun/Kong, Lingyu/Wang, Xin/Xie, Anhuan/Gu, Jason/Zhu, Shiqiang
-
Multi-Class Industrial Texture-less Object Detection Method in Cluttered and Occluded Scenes
Li, Sicong/Zhu, Feng/Wu, Qingxiao
-
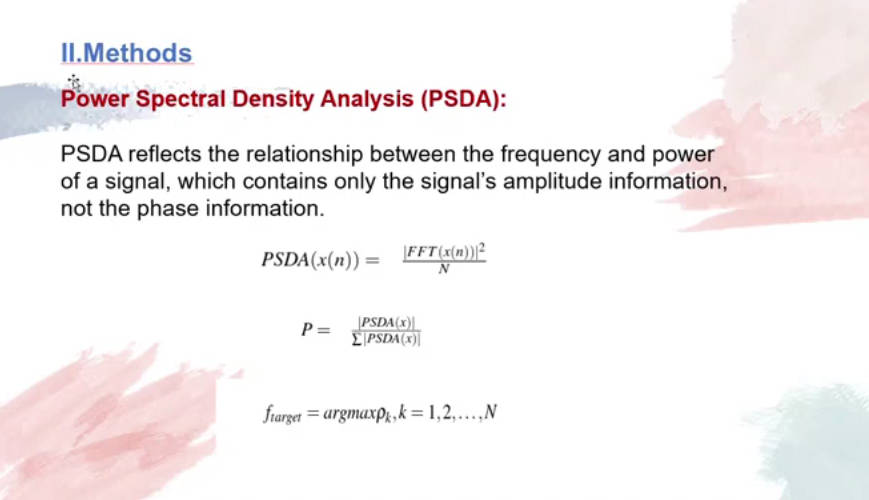
A New CCA-Based Method for Improving SSVEP-Based BCI System Classification
Cui, Yingxue
-
The Impact of Chatbot Avatars on Relationship Quality in Commercial Scenarios
Tu, Yangjun/Xiao, Lijun/Yang, Zhi
-
Adaptive Formation Structure Control for USVs with Security Protection Mechanism
Yin, Shilin/Zhang, Guoqing/Huang, Chenfeng