-
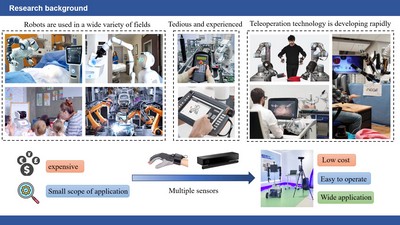
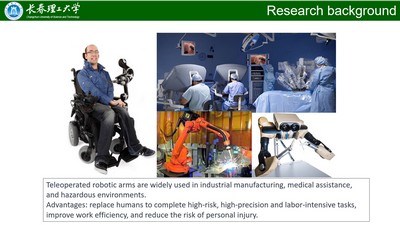
Integrating Sensor Fusion for Teleoperation Control of Anthropomorphic Dual-Arm Robots
Wang, Feilong/Chen, Furong/Yang, Xiaolong/Yong, Qi/Dong, Yanling/Zhang, Xinming/Zheng, Long/Su, Hang
-
Sensor Fusion Based Humanoid Robotic arm Control
Chen, Furong/Wang, Feilong/Yang, Xiaolong/Yong, Qi/Dong, Yanling/Gao, Yi/Zheng, Long/Su, Hang
-
A Fuzzy Inference System on Probabilistic Roadmap for Multi-Robot Path Planning
Replogle, Brandon/Yu, Xiao-Hua
-
Study on the Grinding Speed Model of Eccentric Shaft Components of the RV Reducer for Robotic Arm
Jiang, Zhemin/Fang, Haicheng/Li, Chao/Liu, Shilei
-
An Event-Driven Asynchronous Feature Tracking Method
Xu, Haidong/Jin, Shizhao/Yu, Shumei/Sun, Rongchuan/Sun, Lining
-
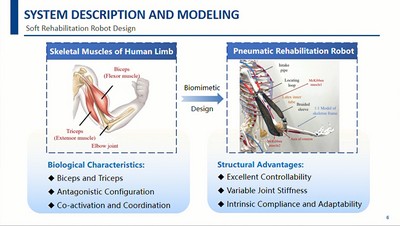
Bio-inspired Control of a Rehabilitation Robot Actuated by Pneumatic Artificial Muscles
Cheng, Maotong/Zhu, Wenxin/Ren, Qinyuan
-
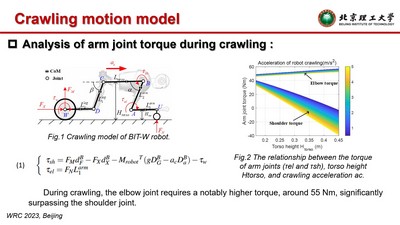
Design of an Impact-Resistant Elbow Mechanism for Wheel-Legged Robot Crawling
Ma, Xs/Gao, Junyao/Qiu, Xuejian/Zhao, Lingxuan/Chen, Xuechao/Yu, Zhangguo/Huang, Qiang
-
Movement Primitives with Explicit Constraints for Imitation Learning of Pick-and-Place Action
Dong, Yue/Yu, Zhangguo/Chen, Xuechao/Wang, Chenzheng/Huang, Qiang
-
Passivity analysis for singular semi-Markovian jump systems based on T-S fuzzy model
Xu, Tianbo//Jin, Meixi/Qi, Wenhai/Wang, Jin