-
Cooperative Manipulator Control Based on IgH Ethercat Master
Luo, Xuejin/Yang, Siqin/Xu, Hao/Lu, Chunheng/Wang, Junchen
-
Deep Vision Guided Mobile Robot Dual Axis PID Dynamic Real Time Adjustment Following
Li, Yang/Yang, Guanci/He, Ling/Zhao, Le/Zhao, Tianyi/Sun, Haoran
-
Modeling and Simulation of Submarine Launched UAV Formation and Formation Reconfiguration with Initial Discrete
Jia, Huayu/Zheng, HuiLong/Zhou, Hong/Zhang, Qian/Li, XinSong
-
Edge Detection and Alignment Control Method for Mobile Robots Based on Multi-Lidar Fusion
Gao, He/Tao, Yong/Liu, Xiaonan/Zhang, Yufan/Liu, Haitao/Wan, Jiahao
-
An Edge-Fog-Cloud-based hierarchical adaptive for Human-Robot Interaction
Fan, Haoyu/Li, Zhijie/Su, Hang/Qi, Wen
-
A Review of Mobile Robots in Extreme Environments
Li, Yuhan/Wang, Shengzhi/Du, Juan/Qi, Wen
-
Modeling and Motion Analysis of a Bio-Falling Cat Robot with Flexible Legs
Cao, Jian/Xue, Liang/Xue, Liang/Wang, Shanbo/Han, Shun
-
Toward Safe Human-Robot Interaction: More Efficient Safety Monitoring Technology For Robotic Arms
Gong, Zihang/Liu, Zhaowei/Su, Hang
-
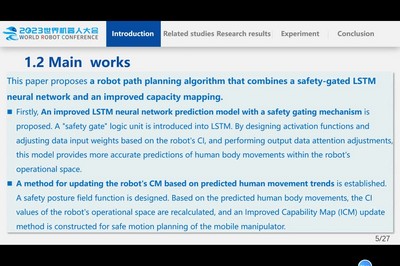
A Safety Motion Planning Algorithm for Mobile Manipulator Based on Improved LSTM Neural Network and Capability Map
Wan, Jiahao/Tao, Yong/Liu, Xiaonan/Song, Yian/Gao, He