-
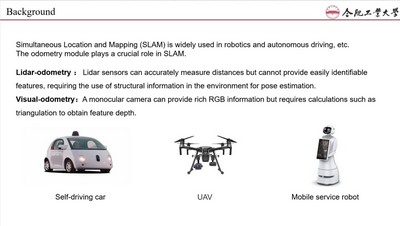
Direct Monocular Visual Odometry Based on Lidar Vision Fusion
Fang, Baofu/Pan, Qing/Wang, Hao
-
Path Planning Algorithm for Long-Range Autonomous Underwater Vehicles Based on Environmental Features
Ji, Daxiong/Cheng, Huifang
-
A Novel Dynamic Motion Planning Based on Error Tolerance Batch Informed Tree
Cao, Zhimin
-
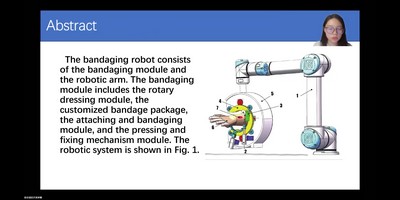
Preliminary Design of Robotic System for Closing Incision by Rotating Bandage Method
Chen, Anqi/Ma, Xudong/Sun, Yixin/Liu, Wenyong/Wang, Junchen/Li, Changsheng/Hu, Yida/Su, Baiquan
-
Teleoperation of Multi-functional Neurosurgical Tool
Ma, Xudong/Yao, Lechen/Chen, Anqi/Wang, Junchen/Li, Changsheng/Liu, Wenyong/Hu, Yida/Su, Baiquan
-
Gesture Control Method for Oral Blood Mixed Liquid Removal Robot
Ma, Xudong/Kuang, Ziao/Li, Han/Chen, Anqi/Li, Changsheng/Liu, Wenyong/Wang, Junchen/Hu, Yida/Gao, Li/Su, Baiquan
-
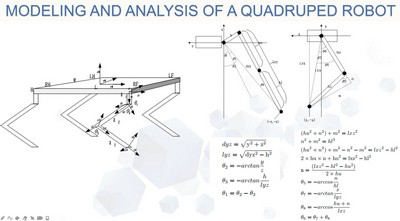
Gait Planning and Motion Control Based on Vrep Simulation for Quadruped Robot
Zhou, Linqi/Chen, Zhihua/Liu, Jun/Liu, Zhi/Chen, Yumeng/Zhang, Liting
-
Motion Planning and Tracking Control Method Based on CoppeliaSim for UGV in Irregular Terrain
Huang, Jiale/Chen, Zhihua/Zhong, Yongbo/Zeng, Wenrui/Ji, Chuanmin
-
Embroidery Robotics: An Innovative Approach to AI-based Online Learning and Image Generation
Chen, Ling/Zhang, Tianxin/Chen, Jing