-
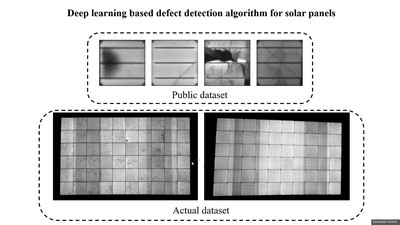
Deep Learning Based Defect Detection Algorithm for Solar Panels
Li, Jiaqi/Li, Hongxu/Wu, Yifan/Zhou, Hailiang/Manfredi, Luigi/Li, Peng/Zhang, Hong
-
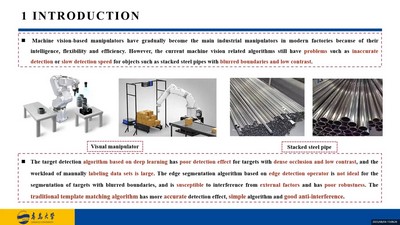
Fast Identification of Stacked Steel Pipes based on Improved NCC Algorithm
Sun, Chuanzhu/Mingjie, Yao/Fu, Chaoxing
-
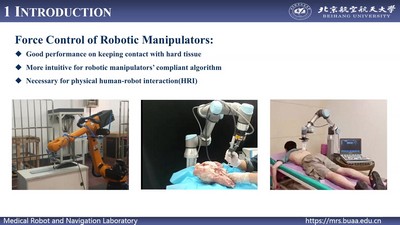
A Disturbance Compensation Method Using Adaptive Neural Network for Robotic Manipulator
Yang, Siqin/Lu, Chunheng/Luo, Xuejin/Wang, Junchen
-
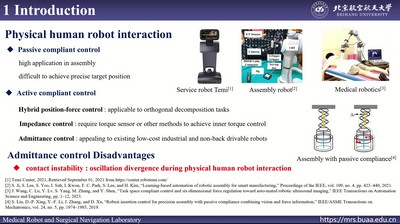
Instability Detection during Physical Human Robot Interaction Based on Wavelet Decomposition
Lu, Chunheng/Chen, Chenghao/Song, Zhihong/Wang, Junchen
-
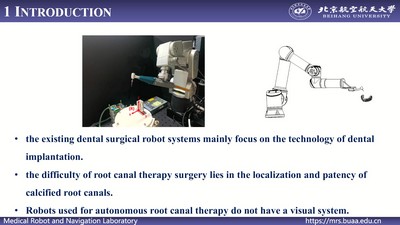
Root Canal Therapy Assisted Robot System
Deng, Yingyan/Piao, Yang/Lu, Chunheng/Bao, Xudong/Dong, Yanmei/Wang, Junchen
-
Event-Potential Method for Mobile Robot Motion Planning and Control
Sheng, Yongji/Ye, Jiajie/Wang, Siyu/Liu, Xinyu/Xi, Ning
-
Kinematics Solution of Cable-Driven Parallel Robots Considering Cable Sagging
Gao, Feng//Gao, Lifu/Wang, Daqing/Jiang, Man
-
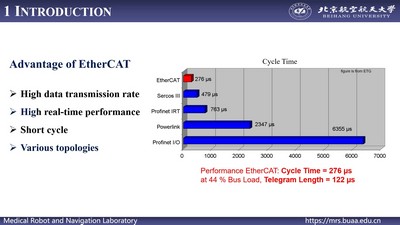
Cooperative Manipulator Control Based on IgH Ethercat Master
Luo, Xuejin/Yang, Siqin/Xu, Hao/Lu, Chunheng/Wang, Junchen
-
Deep Vision Guided Mobile Robot Dual Axis PID Dynamic Real Time Adjustment Following
Li, Yang/Yang, Guanci/He, Ling/Zhao, Le/Zhao, Tianyi/Sun, Haoran