-
Embroidery Robotics: An Innovative Approach to AI-based Online Learning and Image Generation
Chen, Ling/Zhang, Tianxin/Chen, Jing
-
A Fuzzy Inference System on Probabilistic Roadmap for Multi-Robot Path Planning
Replogle, Brandon/Yu, Xiao-Hua
-
Study on the Grinding Speed Model of Eccentric Shaft Components of the RV Reducer for Robotic Arm
Jiang, Zhemin/Fang, Haicheng/Li, Chao/Liu, Shilei
-
An Event-Driven Asynchronous Feature Tracking Method
Xu, Haidong/Jin, Shizhao/Yu, Shumei/Sun, Rongchuan/Sun, Lining
-
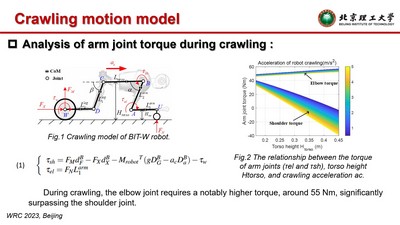
Design of an Impact-Resistant Elbow Mechanism for Wheel-Legged Robot Crawling
Ma, Xs/Gao, Junyao/Qiu, Xuejian/Zhao, Lingxuan/Chen, Xuechao/Yu, Zhangguo/Huang, Qiang
-
Movement Primitives with Explicit Constraints for Imitation Learning of Pick-and-Place Action
Dong, Yue/Yu, Zhangguo/Chen, Xuechao/Wang, Chenzheng/Huang, Qiang
-
Depth Control of Cable Patrol Autonomous Underwater Vehicle Based on Reinforcement Learning
Zhang, Yuenan/Zhang, Xueting/Zeng, Fanzong/Sun, Shangwei/Liu, Jingbiao/Zhou, Zhe Fang/Guo, Chenhang/Wang, Dongrui
-
Developing a Comprehensive Model for the Prevention of Tension Neck Syndrome: A Focus on Musculoskeletal Disorder Prevention Strategies
Sohani, Behnaz/Adigun, Ifeoluwa Joshua/Aliyu, Aliyu/Rahmani, Amir/Goher, Khaled