-
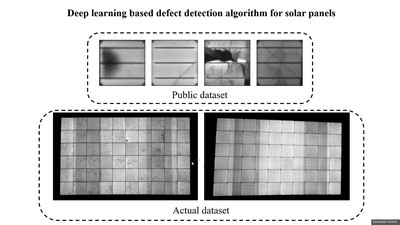
Deep Learning Based Defect Detection Algorithm for Solar Panels
Li, Jiaqi/Li, Hongxu/Wu, Yifan/Zhou, Hailiang/Manfredi, Luigi/Li, Peng/Zhang, Hong
-
Event-Potential Method for Mobile Robot Motion Planning and Control
Sheng, Yongji/Ye, Jiajie/Wang, Siyu/Liu, Xinyu/Xi, Ning
-
Kinematics Solution of Cable-Driven Parallel Robots Considering Cable Sagging
Gao, Feng//Gao, Lifu/Wang, Daqing/Jiang, Man
-
Modeling and Simulation of Submarine Launched UAV Formation and Formation Reconfiguration with Initial Discrete
Jia, Huayu/Zheng, HuiLong/Zhou, Hong/Zhang, Qian/Li, XinSong
-
Edge Detection and Alignment Control Method for Mobile Robots Based on Multi-Lidar Fusion
Gao, He/Tao, Yong/Liu, Xiaonan/Zhang, Yufan/Liu, Haitao/Wan, Jiahao
-
Toward Safe Human-Robot Interaction: More Efficient Safety Monitoring Technology For Robotic Arms
Gong, Zihang/Liu, Zhaowei/Su, Hang
-
A Novel Dynamic Motion Planning Based on Error Tolerance Batch Informed Tree
Cao, Zhimin
-
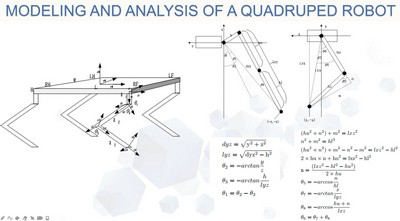
Gait Planning and Motion Control Based on Vrep Simulation for Quadruped Robot
Zhou, Linqi/Chen, Zhihua/Liu, Jun/Liu, Zhi/Chen, Yumeng/Zhang, Liting
-
Motion Planning and Tracking Control Method Based on CoppeliaSim for UGV in Irregular Terrain
Huang, Jiale/Chen, Zhihua/Zhong, Yongbo/Zeng, Wenrui/Ji, Chuanmin