-
Acoustic 3D Shape Reconstruction of Zygomatic Bone for Non-Invasive Spatial Registration
Han, Runzhe/Yuan, Mengning/Jie, Bimeng/He, Yang/Zhu, Jiayu/Zhang, Runshi/Wang, Junchen
-
Application of Fuzzy PID Algorithm in Path Control of Intelligent Tracking Vehicles
Zhou, Wenlong; Jun, Wei; Hu, Yan; Liu, Lei; Wang, Yiran
-
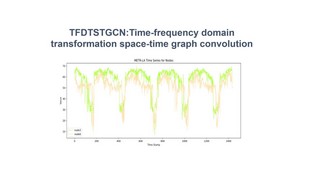
TFDTSTGCN:Time-Frequency Domain Transformation Space-Time Graph Convolution
Huang, XuPeng; Yang, Yang; Yang, Chao; Cui, Yuhao
-
Autonomous Prediction of UAV Launch Parameters Based on SSA-BP Model
Jia, Huayu; Zheng, HuiLong; Huo, Shunbo; Zhou, Hong; Zhang, Qian
-
Obstacle Avoidance Path Planning for Robotic Arm Based on EIT Tactile Sensing
Meng, Kai; Zheng, Wendong; Weng, Ling; Liu, Huaping
-
AvTF: A Visual-Tactile Fingertip with Active Sensing and Manipulation
Zhao, Jie; Bin Fang and Jianhua Shan
-
Virtual Variable Stiffness Control Method for Quadruped Robot Leg Based on Contact Event
Sun, Jingyu; Zhou, Lelai; Zhang, Yi; Li, Guowei; Fan, Shenglin; Sui, Mingjun; Dai, Xiaomeng; Li, Yibin
-
Design and Realization of a Multimodal Wheel-Leg Hybrid Mobile Robot
Xie, Zijian; Qin, Jianjun; Li, haibo; Fang, Shihao
-
Indoor Mobile Robot Map Construction Based on Improved Cartographer Algorithm
Zheng, Zhong; Xie, Mujun; Jiang, Changhong; Bian, HeYu; Wang, Wei