展商介绍

无锡陆吾智能科技有限公司
展位号 B228
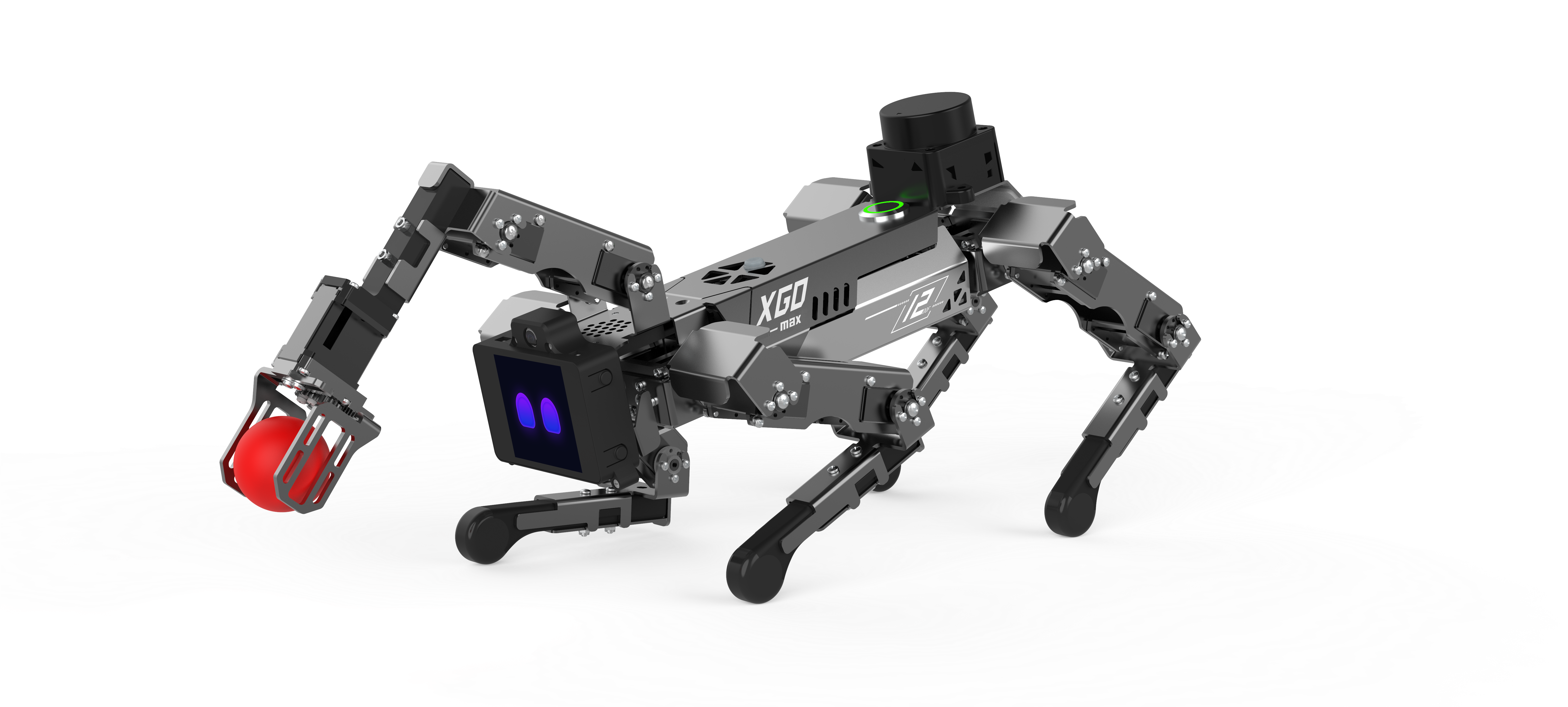
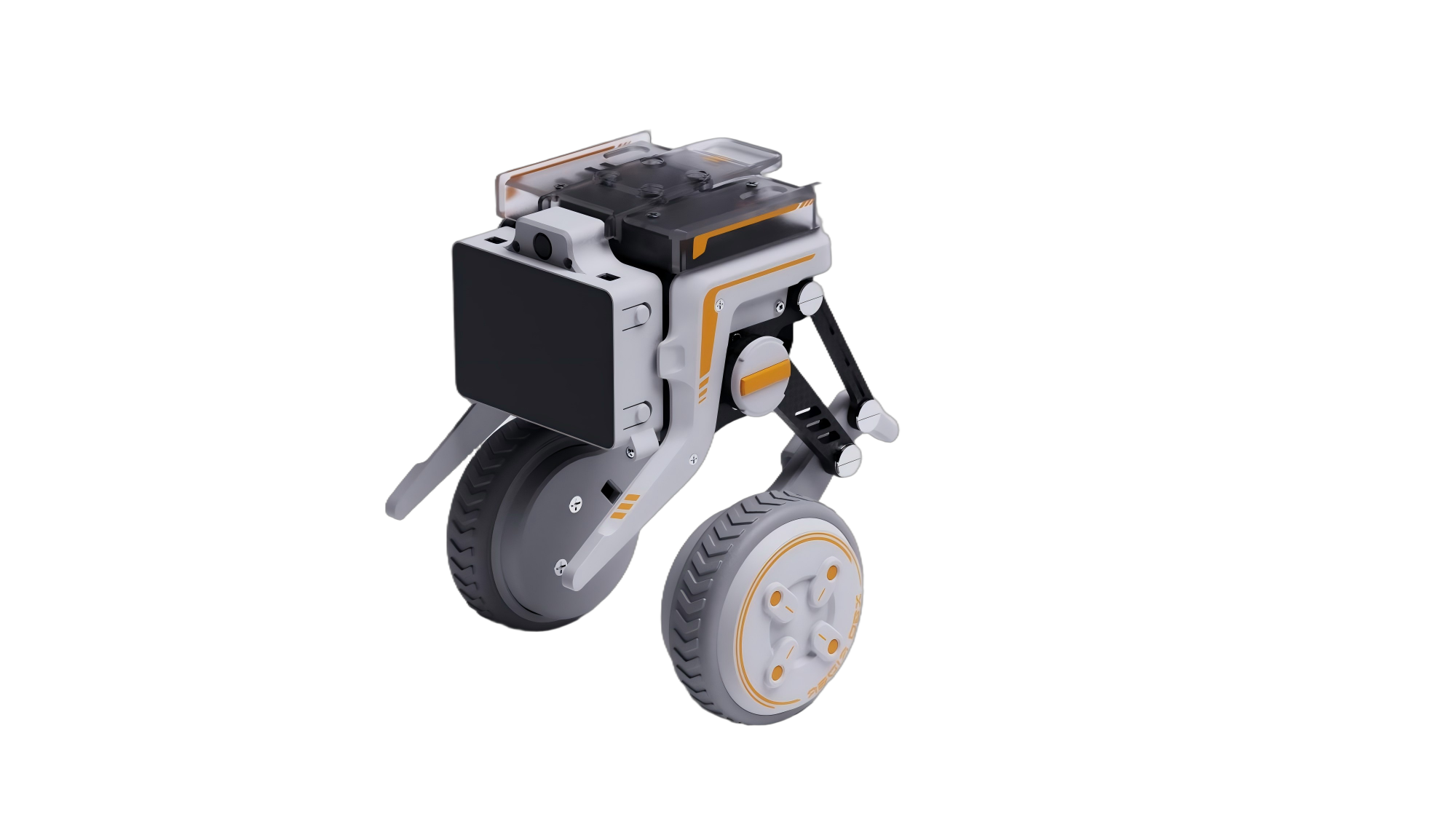
无锡陆吾智能科技有限公司成立于 2020 年 11 月,核心团队来自哈尔滨工业大学机器人技术与系统国家重点实验室。公司专注于桌面级双足、四足、轮足机器人等多拟态机器人的技术研发与场景应用。 以桌面仿生机器人为切入点,陆吾智能将前沿机器控制技术与开源硬件生态融合,打造出 XGO 系列产品。产品矩阵中, 双轮足集成先进部件,能实现全向移动等复杂运动;四足机器狗以仿生步态算法为亮点,构建智能运动体系;即将推出的 四轮足可实现四足、四轮、轮足三种模态切换。 在应用上,其多拟态机器人形成 “硬件 + 软件 + 生态” 闭环。开源生态方面,兼容主流开源硬件平台,支持多语言编程,为学习者提供全链条实践场景
企业宣传册