展商登录
|
中
|
EN
首页
新闻中心
世界机器人大会论坛
世界机器人博览会
世界机器人大赛
参会报名
媒体相关
联系我们
序厅
A馆
B馆
E馆
展馆导航
广州高擎机电科技有限公司
展位号:A231
展品
介绍
新
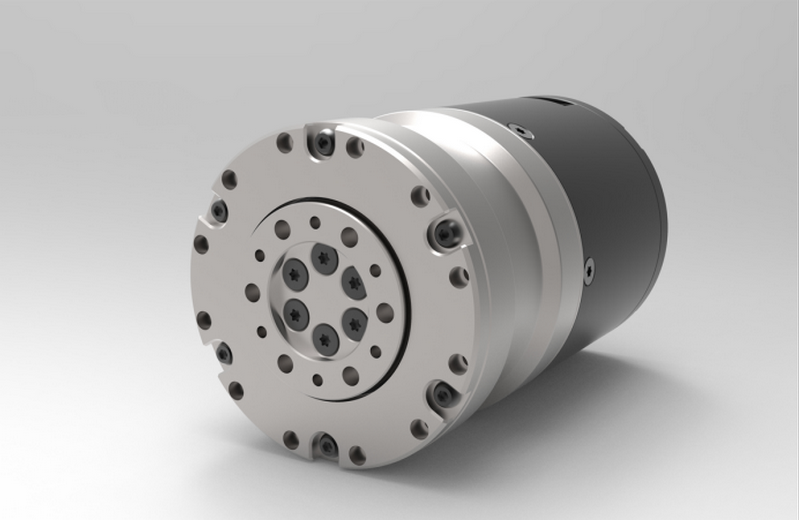
高性能高效率关节执行器 5046
HTDW-5046-20-NE,高效率 高性能 小体积 大扭矩,主要应用于足式机器人、轮足式机器人或轮式机器人上。
了解更多
新
超小10自由度高性能双足机器人π
这是全球首款量产的小型双足机器人“π”,拥有酷炫的机身,符合人体结构的设计,自研的机器人关节,超高的运动性能,支持二次开发,适用于教育科研领域,是一款真正适用于开发者的双足机器人。
了解更多
新
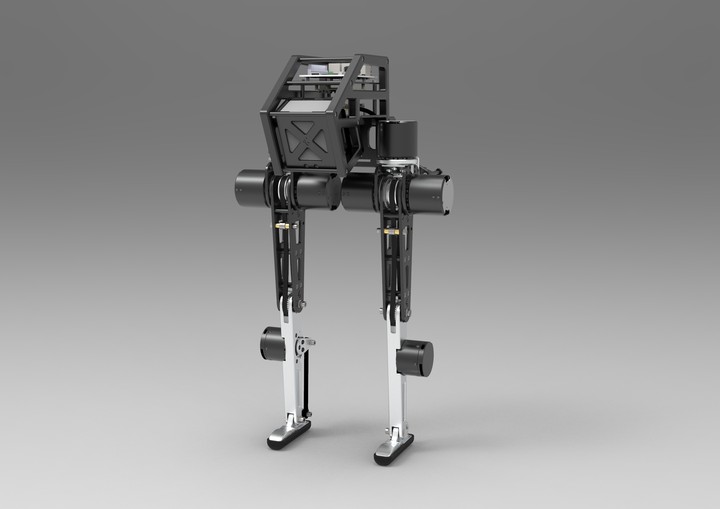
0.7m人型机器人——元
0.7m人型机器人“元”,拥有酷炫的机身,符合人体结构的设计,自研的机器人关节,超高的运动性能,适用于教育科研领域。
了解更多
新
小型无刷轮足开发平台——小怪兽 Dino
轮足机器人Dino,体积小,重量轻,研究更加轻便,5大功能集一身,开源平台,适合学习研究、二次开发,备价格优势,高性价比。
了解更多
新
桌面级6轴机械臂 LightArm-500
LightArm-500桌面级六轴机械臂,轻巧灵活,超高性价比,针对教育科研领域,为用户提供更入门友好的开发平台。
了解更多
新
桌面级6轴机械臂 LightArm-1000
LightArm-1000桌面级六轴机械臂,轻巧灵活,超高性价比,针对教育科研领域,为用户提供更入门友好的开发平台。
了解更多
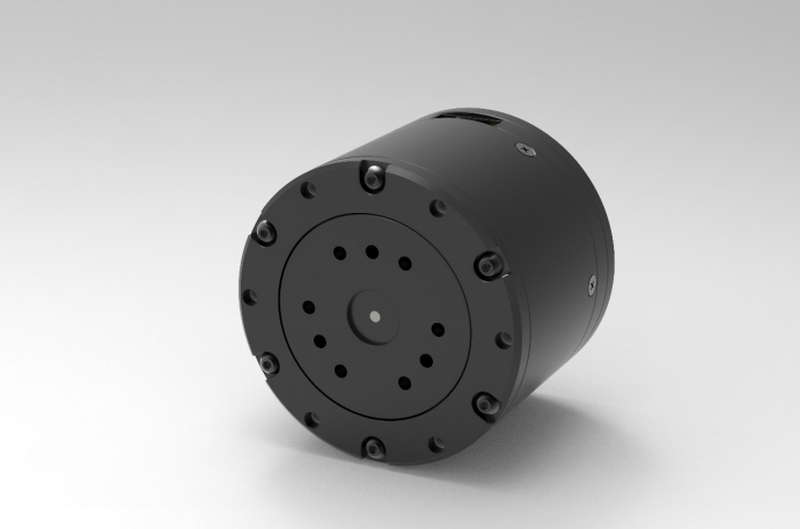
新
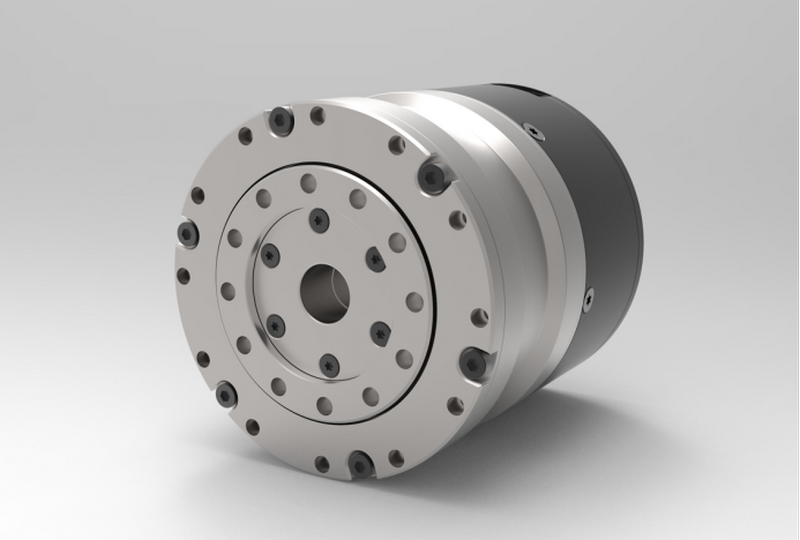
高扭矩密度关节模组 4542
HTCW-4542-23-NC,高扭矩密度 高刚度 高抗冲击能力,适用于人形机器人的腕关节、踝关节,轮足机器人的旋转关节、机械臂的末端关节等。
了解更多
新
高性能高效率关节执行器 4538
HTDW-4538-20-NE,高效率 高性能 小体积 大扭矩,主要应用于足式机器人、轮足式机器人或轮式机器人上。
了解更多
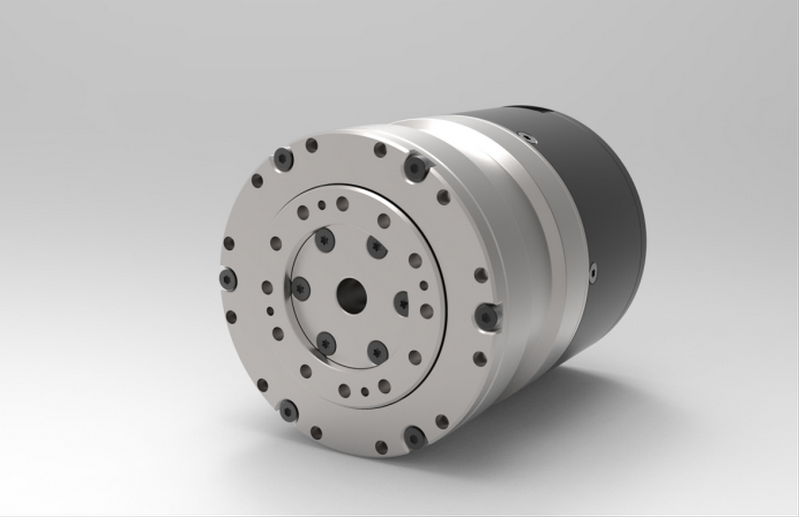
新
高扭矩密度关节模组 5048
HTCW-5048-36-NC,高扭矩密度 高刚度 高抗冲击能力,适用于人形机器人的腕关节、踝关节,轮足机器人的旋转关节、机械臂的末端关节等。
了解更多
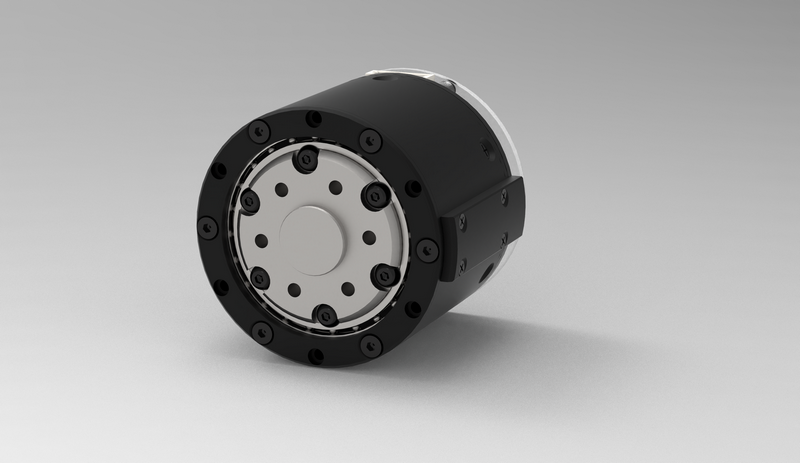
新
高精度机器人关节模组 6577
HTCP-6577-51-YC(中空结构),小体积 高精度 大扭矩 0背隙,广泛适用于机械臂、陪伴机器人、高精度车床、磨床、医疗器械等多种高端应用场景中。
了解更多
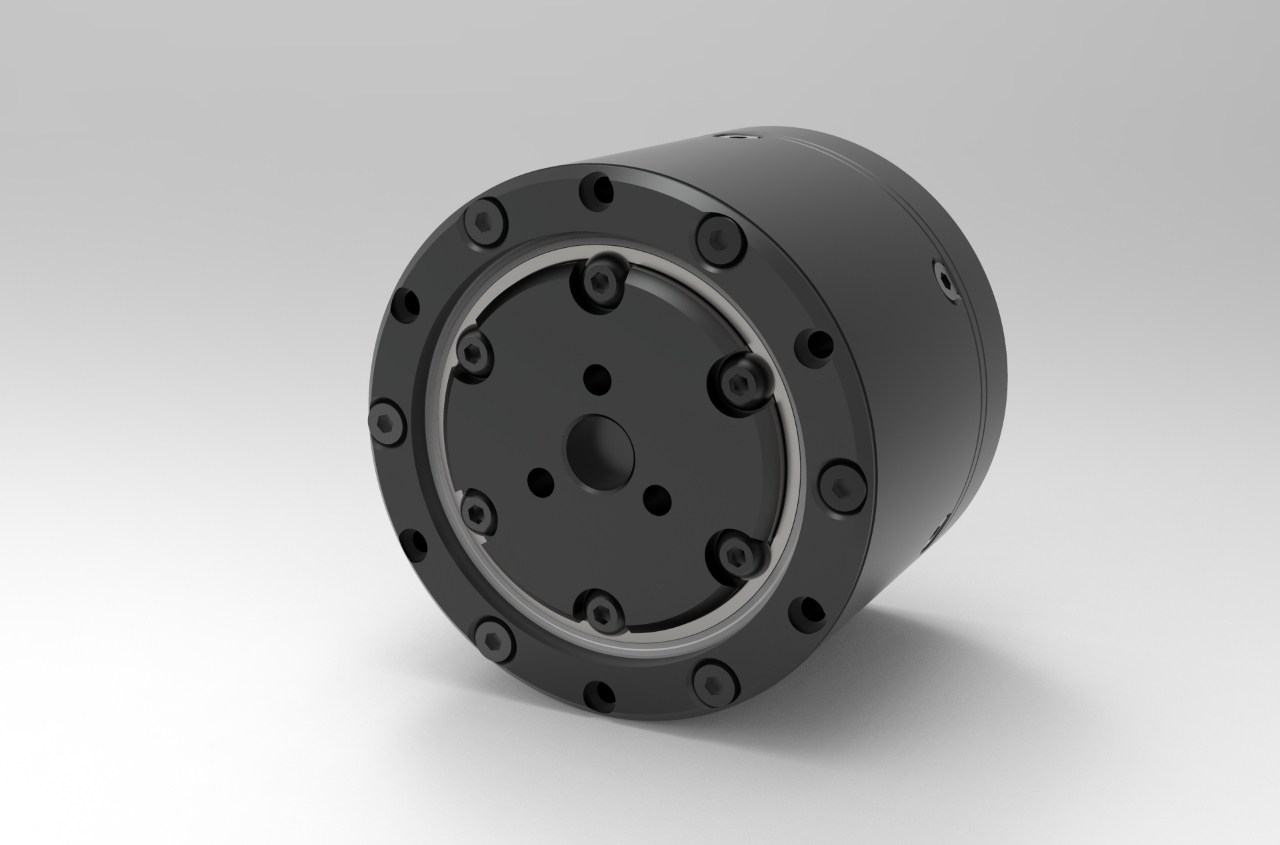
新
高精度机器人关节模组 5673
HTCP-5673-41-YC(中空结构),小体积 高精度 大扭矩 0背隙,广泛适用于机械臂、陪伴机器人、高精度车床、磨床、医疗器械等多种高端应用场景中。
了解更多
新
高精度机器人关节模组 4470
HTCP-4470-40-NC(串联结构),小体积 高精度 大扭矩 0背隙,广泛适用于机械臂、陪伴机器人、高精度车床、磨床、医疗器械等多种高端应用场景中。
了解更多
展商
介绍
广州高擎机电科技有限公司
广州高擎机电科技有限公司专注于机器人关节技术,拥有强大的研发能力,坚持自主创新。高擎机电现已具备力矩电机、减速机、电机驱动、一体化关节模组、关节结构、运动控制等全套关节动力技术,能够提供机器人关节技术的全面支持和优质的定制化服务。目前,高擎机电已自研出多款高性能的减速机、关节模组、多种机器人关节和机器人整机产品,产品的性能、性价比均有明显优势。我们希望通过自身的努力,为机器人行业创造新的可能!
访问官网
主办单位
北京市人民政府
中华人民共和国工业和信息化部
中国科学技术协会
承办单位
中国电子学会
北京市经济和信息化局
北京经济技术开发区管委会
获取有关世界机器人大会的最新动态
请扫描左侧二维码关注大会官方微信
中国电子学会 © 2015-2023 All rights reserved
备案号:京ICP备12041980号-10

 广州高擎机电科技有限公司
展位号:A231
广州高擎机电科技有限公司
展位号:A231
 获取有关世界机器人大会的最新动态
请扫描左侧二维码关注大会官方微信
获取有关世界机器人大会的最新动态
请扫描左侧二维码关注大会官方微信