-
草莓采摘机器人
由装备中心熊亚研究员团队与海淀区农业农村局联合研发的全自主草莓采摘机器人“柔采(HarvestFlex)” 已实现双臂连续采摘作业。该机器人100%自主研发,申请14项国内外专利(已授权7项中国发明专利和3项美国专利)。该机器人支持24小时作业,减少过熟损失和微生物污染,已在海淀区示范基地应用,推动草莓产业智能化升级。
查看更多
-
多臂授粉机器人
北京市农林科学院赵春江院士团队和北京市海淀区农业农村局合作自主研发的“温室小蜜蜂”多臂授粉机器人主要应用于大型玻璃温室雌雄同花作物授粉作业,机器人采用了多功能授粉、视觉识别与定位、多传感器融合导航、路轨两用自主切换等多种技术,实现了机器人自动导航授粉作业。
查看更多
-
路轨两用植保机器人
北京市农林科学院赵春江院士团队和北京市海淀区农业农村局合作自主研发的“温室小卫士”路轨两用植保机器人主要应用于大型玻璃温室垂直种植作物植保作业。 1、多传感器融合的导航定位技术,实现了轨道切换<10秒,上下轨道成功率99%,定位精度小于3cm;2、智能变量喷雾系统,实现了作业效率1500㎡/小时,喷雾均匀性变异系数<11%。较人工喷药省工25%、节药60%。
查看更多
-
番茄采摘机器人
针对连栋温室番茄生产周期长,果实采收需求大的特点,研发“采-收-运”一体式番茄采摘机器人,具备自主导航、多任务感知、自主决策、避障采摘、柔性摆放、码垛堆放等功能,实现果实产量巡检-自动采收-采后转运全流程自主作业。支持全自主收获、人机交互和遥控操作多种运行模式,综合效率达400串/小时,是人工采摘的2倍,综合性能达到国际先进水平。
查看更多
-
草莓对靶喷药机器人
草莓对靶喷药机器人主要用于设施草莓农药高效喷施,该设备通过视觉传感器实时探测草莓植株病害信息,通过激光SLAM感知作业环境,自动规划行走路径、避障与地头拐弯。基于病害信息和作业速度进行变量精准喷药,智能决策对靶喷药,能显著节省药量和提高作业效率。
查看更多
-
基于病害识别的芦笋风送喷药机器人
整机采用纯电驱动设计,主要有三大功能板块,①基于机器视觉的芦笋病害识别模块,可实时进行复杂环境下作物常见病害的识别、分级,并作出施药决策,实现基于病害严重程度的变量喷药作业;②基于SLAM的导航模块,可实现设施环境下自主无人植保作业;③支持风力调节的变量喷雾模块,喷雾系统设置四个独立风机,可根据冠层稠密程度调整不同风速,保证药液雾滴穿透冠层沉积均匀同时,减少漂移,节药增效。
查看更多
-
根区注入式土壤消毒机
主要用于标准化设施环境或宽垄距田间的土壤消毒作业。作业幅宽可以根据需求进行调节,扎穴机构的高度可以升降,可实现不同垄距和垄高的土壤消毒作业;采用远程遥控行走的作业方式,作业速度线性可调,作业速度可达1m/s以上;消毒机施药控制系统中集成有物联网监测终端,可以实时监测土壤消毒机的作业速度、注药量和作业面积。
查看更多
-
丘陵果园喷药机器人
喷药机器人主要用于丘陵地形果园的高效植保作业, 配备了增程器动力系统和独立电驱行走系统,可长时间连续作业、无人导航和高精度自动喷药作业、支持遥控或无人驾驶模式,具备远程监控和实时数据传输功能;可良好适应复杂地形和气候条件,实现对靶精准施药,减少农药浪费和残留,降低农业生产成本。
查看更多
-
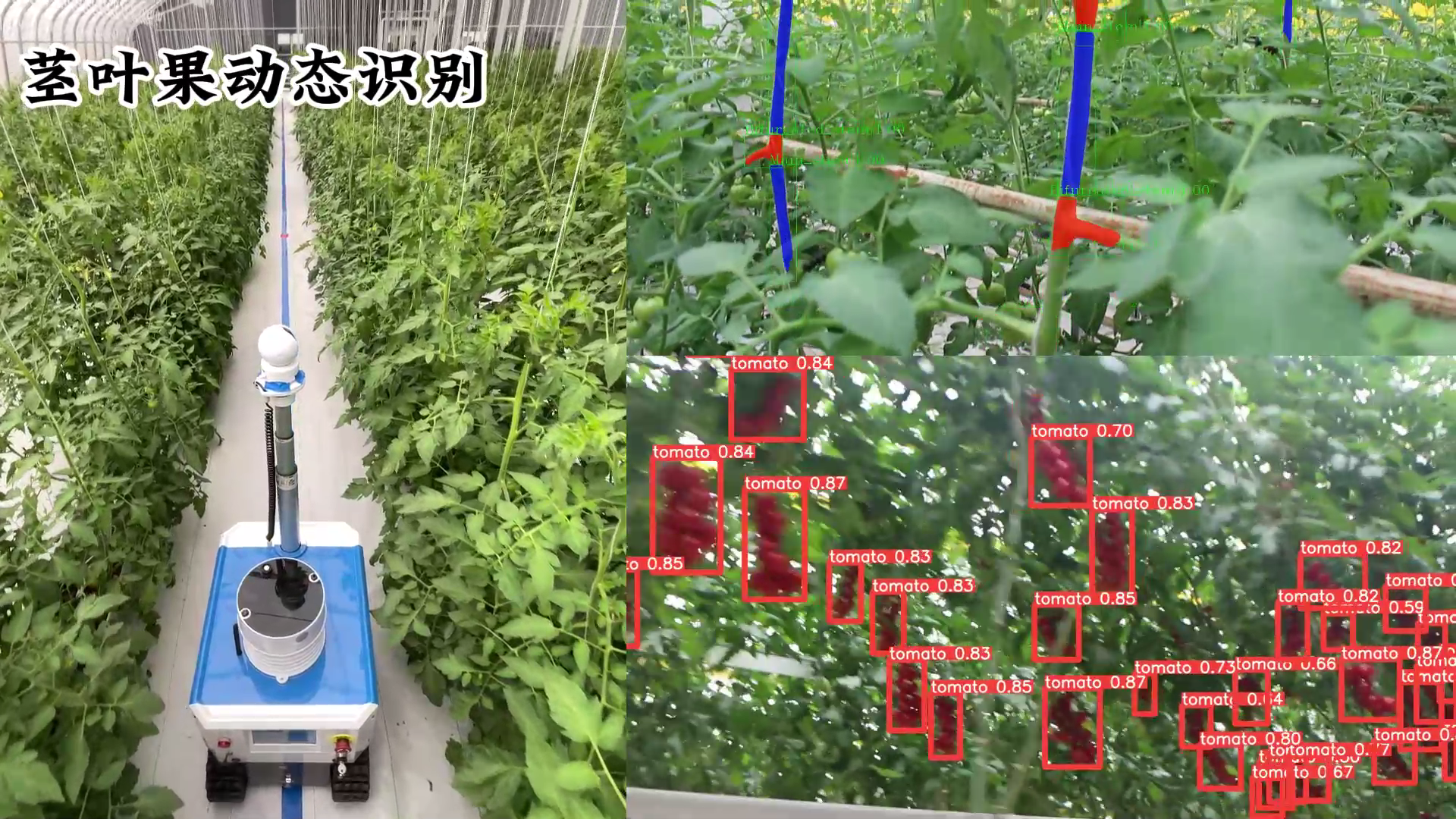
温室生产巡检机器人
温室生产巡检机器人突破温室蔬菜多源生境信息动态获取、长势判断决策和自主导航控制等关键技术,可实现温室生产过程的自主及时巡检,解决传统人工巡检频次高、实时性差的问题。巡检机器人采用自动巡线导航平台,搭载“温-湿-光-气-视”一体式生境传感器,可自动停车定点观测,对植株花序、叶片和果串等目标动态监测。
查看更多
-
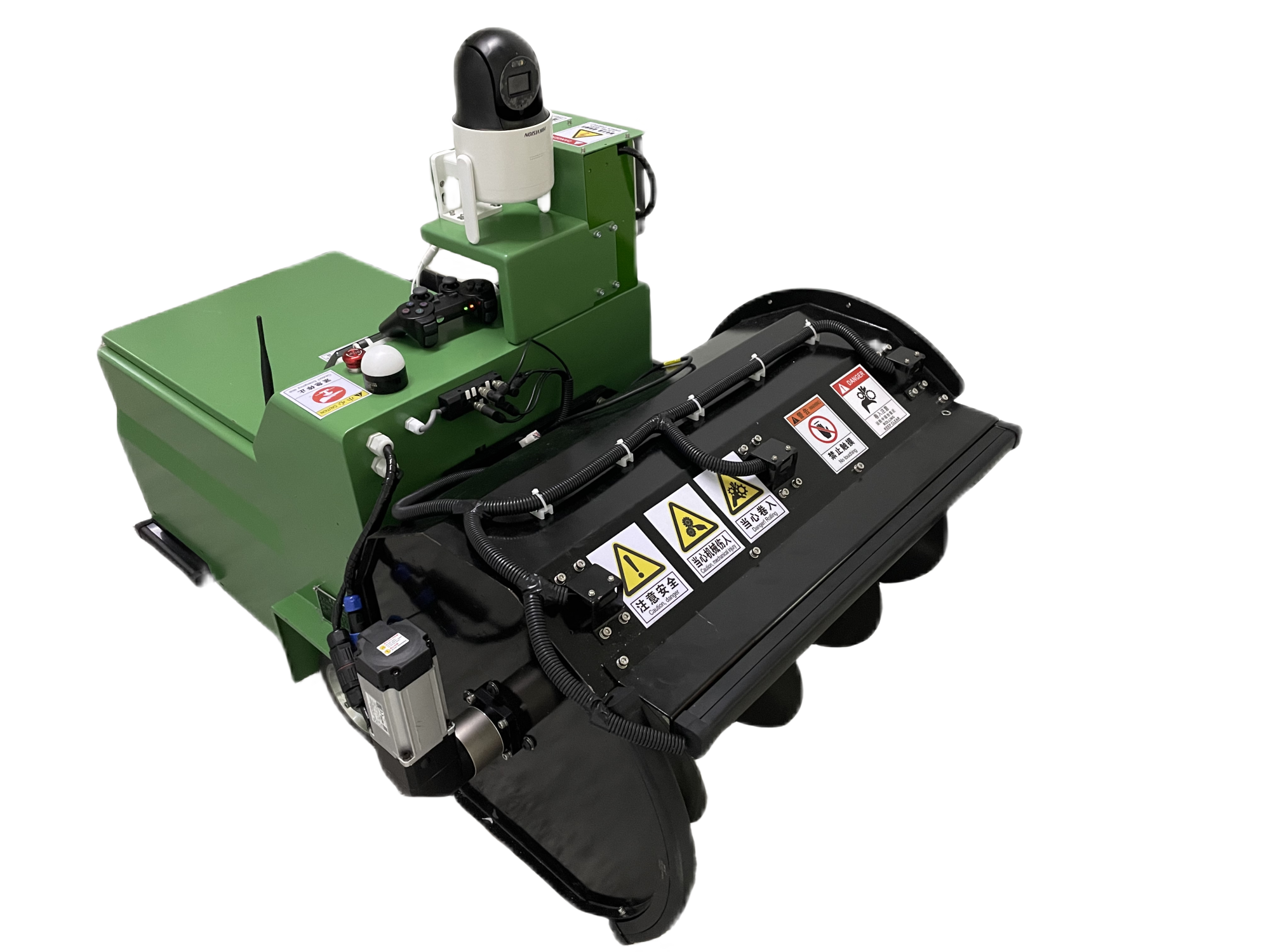
纯电动旋耕机器人
纯电动旋耕机器人以电能作为唯一能量源,采用电机驱动行走和作业部件,集成农机自动驾驶与远程管控系统,具有智能、环保、高效和维护成本低等特点,适用于设施种养、果菜茶园以及丘陵山地的土地耕整作业。实现决策规划、路径跟踪、地头转向、机具操控、声光报警以及作业统计等功能;续航时间≥6小时,亩均成本≤0.6元。
查看更多
-
激光除草机器人
激光除草机器人通过精准的机器视觉系统与动态激光瞄准技术,实现精准绿色除草。单路激光在0.45秒内即可烧死一颗杂草,而采用8路激光的除草机器人除草速率可达6万颗/小时,作业效率高。同时,杂草打击点的识别精度高达94%,确保了精准打击。独创的可变光斑执行器可调节光斑大小在1-5mm之间,结合提出的横摆激光打击模式,有效克服了激光定位误差,从而进一步提高了除草的精准度和效果。
查看更多
-
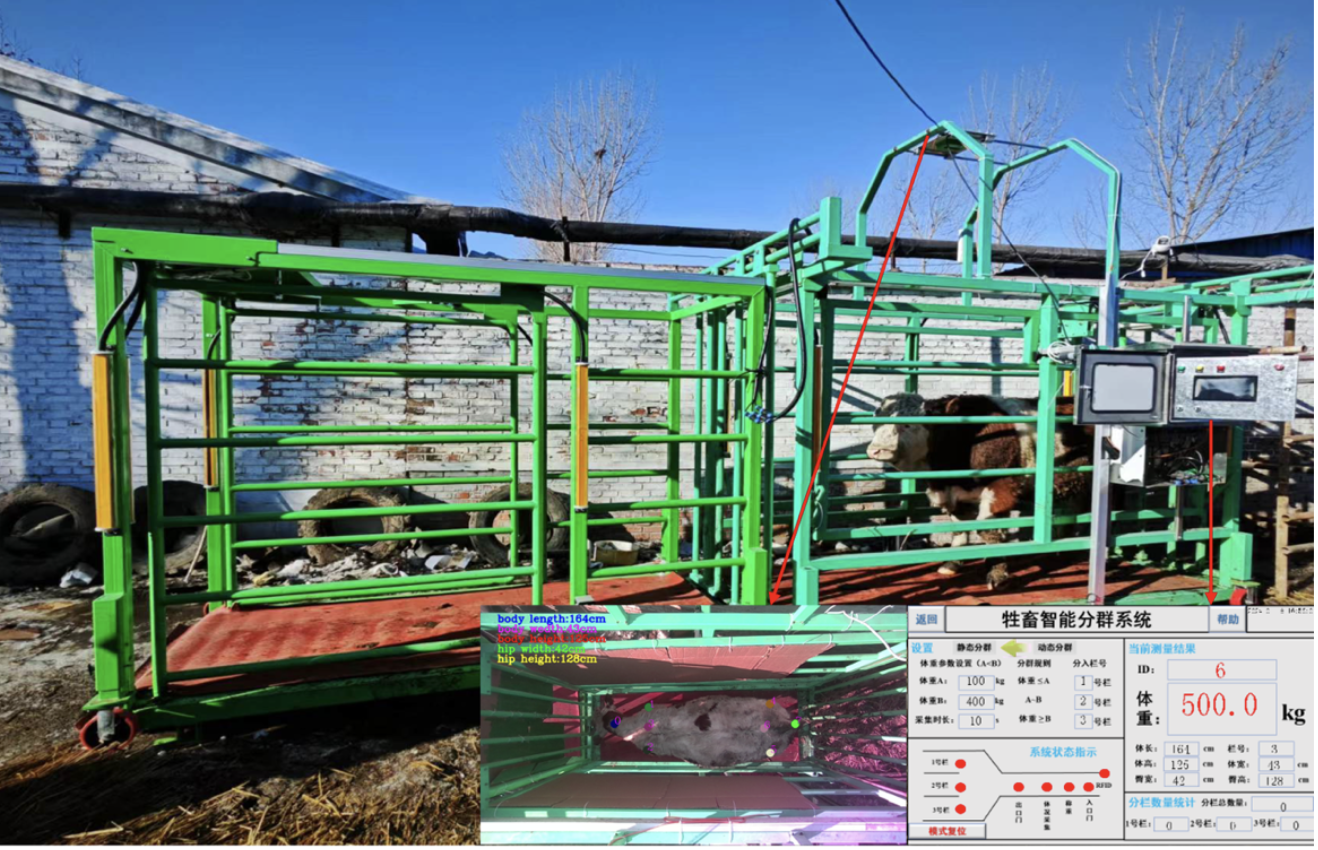
牛羊体重体征智能测定分群装备
牛羊体重体征智能测定分群装备是专为牛羊规模养殖场研发的一体化智能管理设备,在牛羊经过低应激通道时,开展RFID个体识别、称重和体征(主要包括体高、体长、体宽、臀宽、臀高等)数据自动采集、分析及智能化决策,驱动电控高效分群,辅助养殖场及时把握料肉比和动态调群,实现牛羊群体精细化管理和个性化服务。
查看更多
-
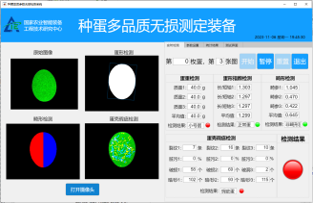
种蛋多品质无损测定装备
开展一体化便携装备机构设计,发开发嵌入式控制系统、数据采集系统和可视化人机交互GUI,对种蛋外部(裂纹、脏污、暗斑、畸形等)、内部(受精、活性、异物、性别) 开展检测算法研究,形成了种蛋孵化品质无损测定装备,实现种蛋自动翻转,多角度品质参数高通量获取与测定,结构紧凑,便于携带。检测时间≤8s;蛋重误差≤3%;畸形蛋准确率≥90%;裂纹蛋准确率≥90%;脏污蛋准确率≥90%。
查看更多
-
低产鸡巡检机器人
研发了鸡舍原位转向底盘,采用两轮差速驱动、高精度地磁传感,实现精确定位、自主导航和动态避障;开展种鸡/种蛋多特征识别算法研究,基于鸡冠/脸特征、颜色、产蛋数量、产蛋质量等多特征,构建了低产种鸡、异常种蛋(脏/血污等)识别算法,实现种鸡产能原位检测;巡检速度4-6米/分钟;脏污蛋识别精度≥91.2%;血污蛋识别精度95.1%;区位产蛋检测准确率≥92.7%。
查看更多
-
猪只无针免疫注射机器人
开展针对猪舍实际场景下机器人底盘导航技术研究,臀部注射点位姿识别与机械臂最优控制算法研发,实时获取臀部区域注射点位姿信息,控制注射器以最优路径到达注射点。集成运动底盘、视觉传感单元、机械臂系统、无针注射单元、中央主控单元,形成猪只无针免疫注射机器人,实现精准圈舍定位、生猪臀部跟踪及无针垂直注射等操作,减少人工干预,提高工作效率与安全性。
查看更多
-
猪/牛/羊体尺高通量无应激测量设备
面向一线猪/羊养殖中体尺参数测量需求,提供集约化解决方案,一站式实现猪/牛/羊体高值、体宽值、体斜长、胸围值、腹围值等参数的自动计算,采用非接触式测量方式,80毫秒内实现电子耳标读取,整体测量时间在2秒内完成;数据自动存储,具有较高的鲁棒性,体尺测量综合准确度达到95%以上。已在四川、北京、云南推广应用。
查看更多
-
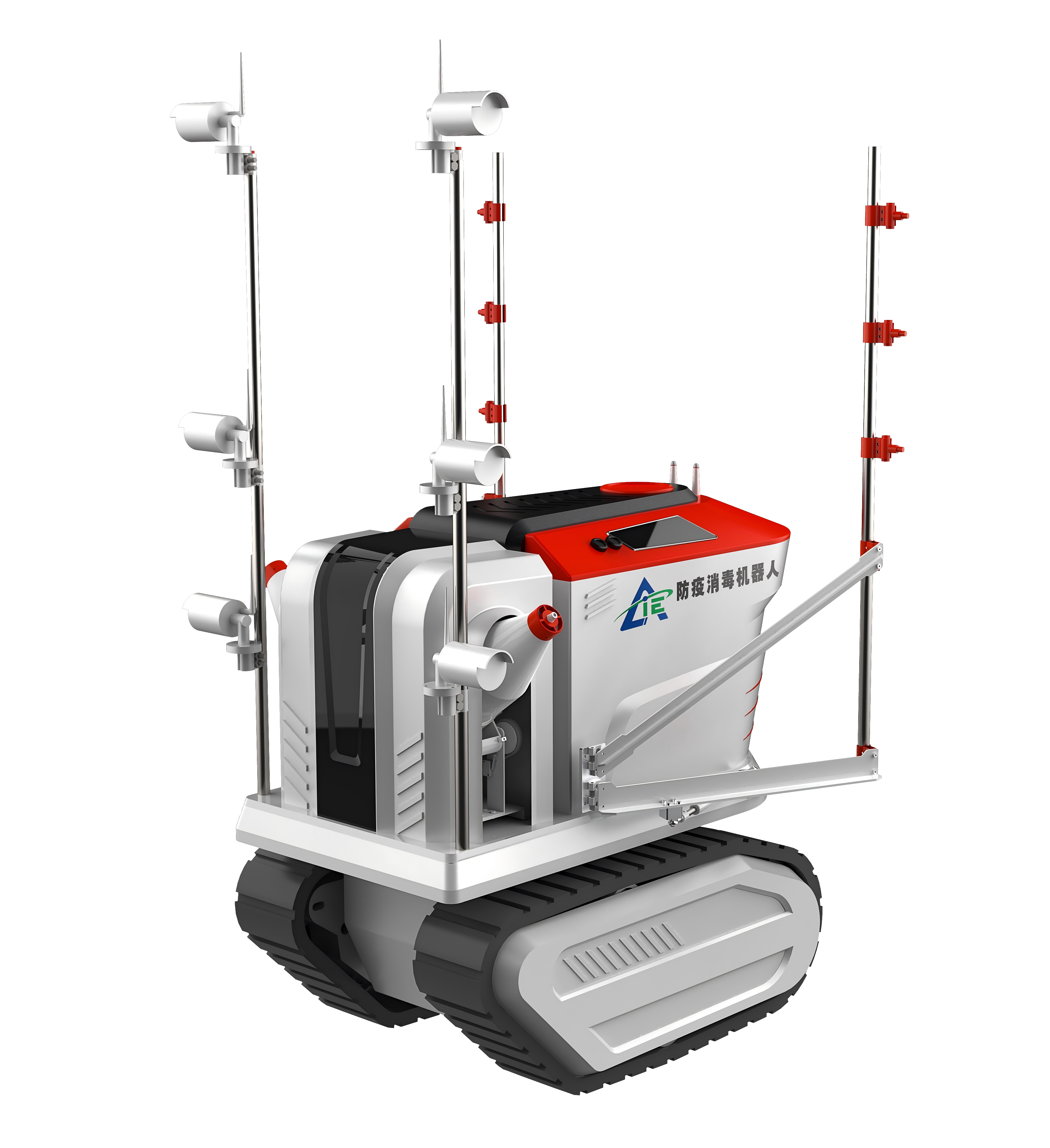
免疫消毒机器人
创制防疫消毒无人化作业模式与装备,可实现畜禽舍内消毒液和免疫试剂的精准喷雾、养殖舍自动导航移动、作业信息物联网远程监控。机器人根据指令可自动进行定点、定量、定时喷雾,同时可对养殖舍内气体、温湿、粉尘等进行远程监测。已在北京、江苏和重庆等多地示范应用。
查看更多
-
景观式水质在线监测平台
配备高精度的传感器阵列,能够对水中的多种关键指标进行快速、准确检测。包括酸碱度(pH)、溶解氧、电导率,到氨氮、化学需氧量(COD)等污染物浓度(可定制),均可实时监测。检测数据通过无线传输技术,实时上传至监控平台,用户可通过手机、电脑随时查看水质状况。搭载先进的自发电技术,可全天候稳定运行,配备了风力发电装置,实现能源的多渠道获取。
查看更多
-
虾蟹AI水产自动分选机
基于机器视觉技术,结合在线自动称重功能实现对螃蟹的自动分级分选。可用于大闸蟹的公母、重量、残次、颜色等品质特征的分选;基于大数据算法对螃蟹等级品质进行分选的AI智能分选机,属于国内首台首套产品,可用于各大水产型分拣中心及其它大型水产分拣场所,为螃蟹在销售过程中的市场定价提供关键性依据,适用于养殖户售卖给商贩过程中的等级品质分选和商贩对电商及终端用户进行二次销售的等级品质分选。
查看更多
-
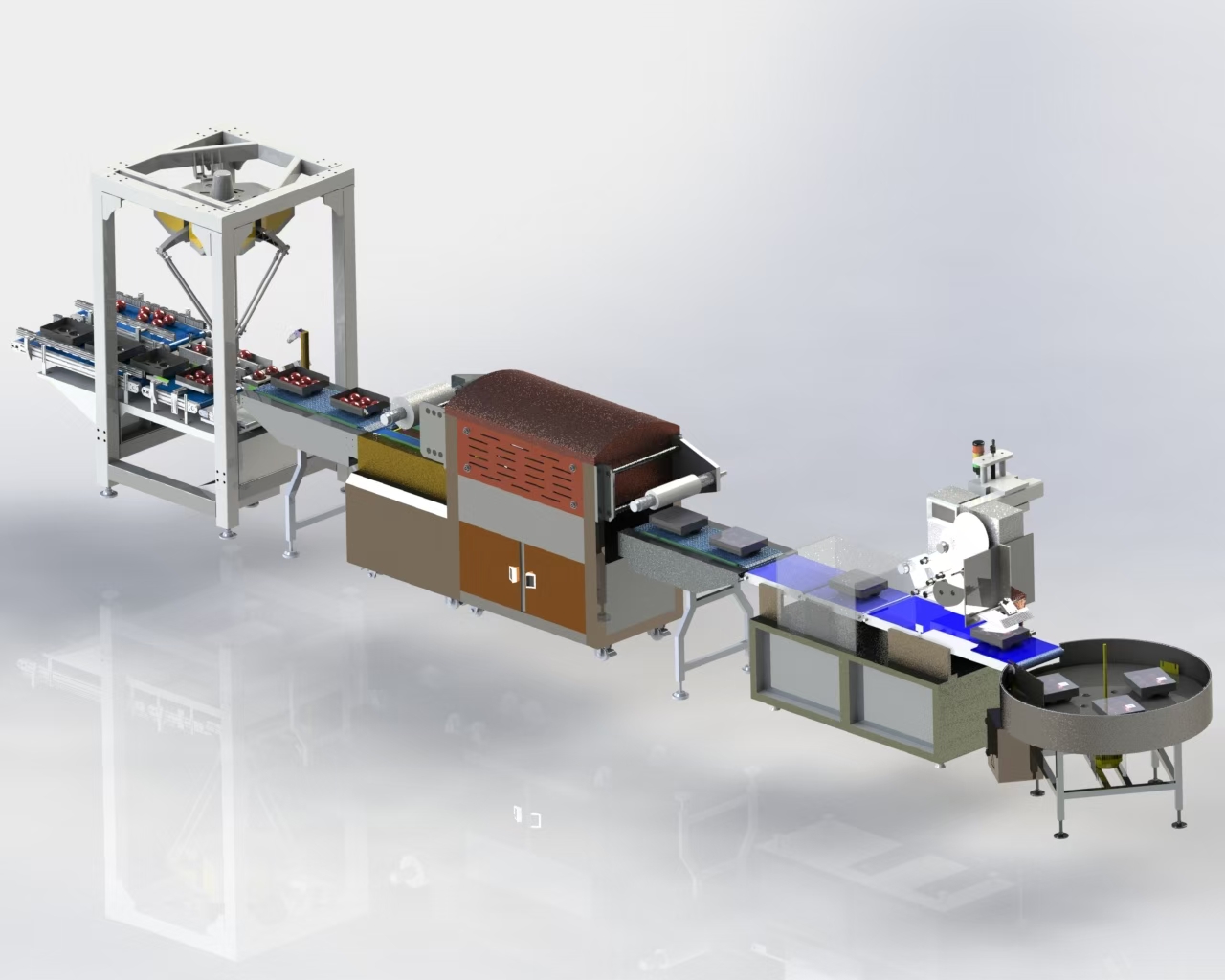
农产品多臂柔性快速包装机器人
是一款针对类球形农产品(苹果、西红柿、大桃等)进行快速自动化精准装箱作业的机器人设备,具有全自动视觉辅助进料、果梗/花萼识别定位、箱体放果位置识别、多臂协同抓取包装、触摸屏显示操作界面、包装数据统计、远程监控等诸多功能。该机器人包装设备集空箱输送、物料输送、自动装箱、满箱输送、封箱为一体,也可以与贴标、打码、称重等其他包装系统配合。
查看更多
-
电驱气力式精量播种机
融合基于FOC的电驱精量排种、电液驱动变量施肥、播种施肥作业监测和基于CAN总线的种肥一体化智能控制技术,创制的高性能智能化电驱气力式精量播种机。
该机型具有作业速度快、作业质量好、智能化水平高的优点。可实现12km/h高速播种作业,较传统播种机作业效率提高20%以上,粒距合格指数提升5%以上。适用于玉米、大豆、蓖麻、高粱等中大籽粒作物免耕、少耕和耕整地播种作业。
查看更多
-
多臂苹果采摘机器人
针对果园智能化高效采收需要,国内首创“采-收-运”一体式果园多臂采摘机器人,重点突破自然环境熟果视觉识别、刚柔耦合采摘臂设计、多臂协同作业任务规划等关键技术,有效提高了采摘机器人信息感知、柔顺操作与高效作业性能。
适用场景:矮化密植标准苹果园
查看更多
-
大田对靶喷药机器人
整车采用线控底盘,大功率四轮独驱独转线控底盘,增加了车辆的机动性和敏捷性。底盘系统采用线控技术,配备先进的电子控制单元(ECU)和传感器来实现精确的驱动和转向控制。机器人配备了先进的定位和导航系统,可以在大田环境中进行准确的定位和路径规划。行内导航行走精度<±5cm,行端转弯半径5.2m ,入行偏差<9.5cm。
查看更多
-
牛舍智能推料机器人
该产品由运动底盘机架、人机控制系统、导航避障系统、双螺旋推送机构、充电系统等部分组成,突破了智能推料方法、螺旋输送机构有限元分析、推料效果仿真等技术,实现了规模化牛舍无人自动高效推料,获得国家发明专利授权,通过农业农村部机械化总站官方检验鉴定,先后在新疆、青海等地开展了实践推广。牛群采食量可提升2%-3%,剩料率由3%-8%下降至2%-3%。
查看更多
-
畜禽健康巡检机器人
面向结构化畜禽舍,能够全自主作业实现畜禽健康巡检。机器人采用多路图像传感同步采集处理技术,深度学习算法,机器人技术等智能识别蛋鸡舍死鸡和弱鸡,并标记异常位置和数据无线传输上云。已在河北、北京、江苏等规模化蛋鸡养殖场应用,异常畜禽识别率达到98%以上,替代人工效率80%以上。
查看更多
-
车载果托式小尺径果蔬品质分级生产线
以小型拖车为载体,灵活拖动自由果托式果蔬品质无损检测分级生产线实现移动式检测,车载果托式分级线采用柔性果托防止果实检测运输过程损伤,采用动态精密称重技术、近红外光谱检测技术为基础,分析获取果实重量、糖度和内部缺陷等多品质参数,实现果实品质快速无损分级。检测对象包括西瓜、柑橘、苹果、番茄、桃、梨、猕猴桃等不同大小的果蔬。
查看更多