展商登录
|
中
|
EN
首页
新闻中心
世界机器人大会论坛
世界机器人博览会
世界机器人大赛
参会报名
媒体相关
联系我们
序厅
A馆
B馆
E馆
展馆导航
江苏集萃智能制造技术研究所有限公司
展位号:A201
展品
介绍
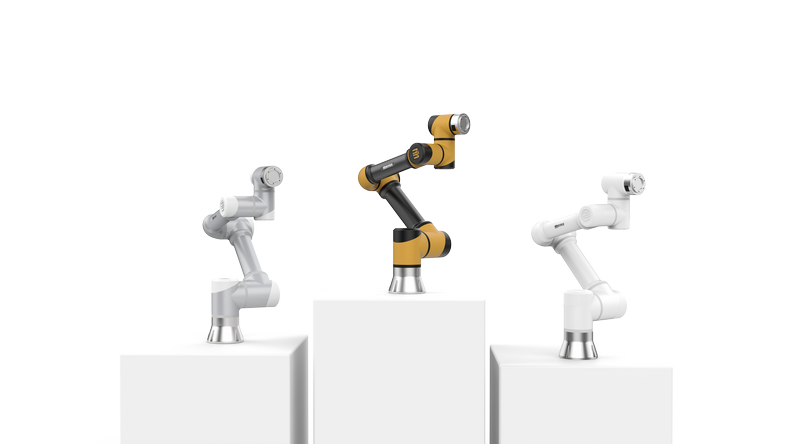
协作机器人
集萃智造协作机器人,自制高功率密度电机、驱控一体化关节模组、高定位精度机器人本体,组成安全、易用、灵活、人机交互性能高。加上特有的拖动示教、碰撞检测技术和自开发的编程语言,在保证安全的基础上使协作机器人更加智能化、柔性化,操作简单,降低机器人使用门槛。可用于精密制造、科研、教育培训、医疗护理等领域,灵活性高,适应性强,有效降低企业生产成本。 集萃智造采用的无力矩传感器六轴机械臂零力的控制方法,主要用于解决直接示教和离线编程所伴随的工作繁琐、规划点不理想的问题,降低机器人自动化工程师的应用门槛。该控制方法要求机器臂各关节均使用谐波减速机该柔性元件,且具备基本的示教编程功能,与轻型协作机器人的设计契合。 在技术、工艺和材料的遴选上,寻求品质、成本与性能的极优化是集萃智造在进行核心零部件和协作机器人产品设计的初衷,也是集萃智造寻求市场破局、坚持国产协作机器人长远发展之道。
了解更多
移动机器人
基于多年来对机器人“手脚眼脑”协同化运作的理念和机器人关键技术的不断突破迭代,集萃智造开发出一系列商用清洁移动机器人产品(诸如清洁消毒移动机器人、消毒移动机器人、清洗移动机器人),高效协同的系统与创新的商业模式让人眼前一亮。 值得一提的是,最近集萃智造突破了移动机器人技术瓶颈,解决了地图实时更新难题,真正开启实时互联、自主协同的智能清洁全新体验。 集萃智造整合传统SLAM技术与领先算法,提出了全新的动态建图技术方案,能完成动态环境下的定位建图能力,并完整地考虑、覆盖了机器人导航应用需求及功能。 尤其在商业环境下,针对其动态环境的高频变化,新技术能够动态地对环境特征进行分析与特征提取,构建完善的动态实时分析机制,并较好提高识别准确率,完成任务的同时,可以更高效动态更新环境地图。 在各种复杂的商用场景,得益于最新动态建图技术的突破和领先的环境感知系统,集萃智造可以为不同行业的客户提供多种解决方案,从而实现全场景的清洁协作,提高清洁质量。
了解更多
六足机器人
六足机器人是基于仿生原理研制的轮腿复合式推进机器人,其推进方式综合了轮式推进速度快、稳定性好和仿生足式推进灵活性高、适应性好的优点,能够广泛地应用于野外以及复杂恶劣的环境中。六足机器人能在水、陆环境自由切换,在地震救灾、野外侦察、资源探测等领域发挥重要作用。 集萃智造结合仿生学、机构学、机构综合等学科的基本理论,研发出二代水陆两栖六足机器人,针对机械结构进行了减重优化、大幅提升运行速度、提高爬坡能力及续航能力,实现两栖六足机器人的高移动效率、低运动噪声、高能量利用率、高环境适应能力的目标。
了解更多
三栖机器人
1.能够自适应水陆空不同介质环境,通过核心旋翼机构的全向位置控制能够控制机器人的推力方向,便于实现机器人空中飞行、陆地滚动、水下潜行等功能。 2.提出轻量化结构设计和紧凑型电机驱动设计,将轻量化车身作为产品的核心性能指标,确保三栖机器人能够灵活机动并确保续航能力。电机作为快速路面驱动核心,与旋翼共同构成动力、转向的联合控制系统。 3.将多旋翼飞行器和伞状轮式机构之间的连接轴设计成可伸缩结构,使其可以迅速便捷地压缩和展开,提高便携性。 4.提出超静音设计,利用轻量化车身与旋翼提供静音控制,同时加入主动降噪模块减少高频噪音,实现超静音能力。
了解更多
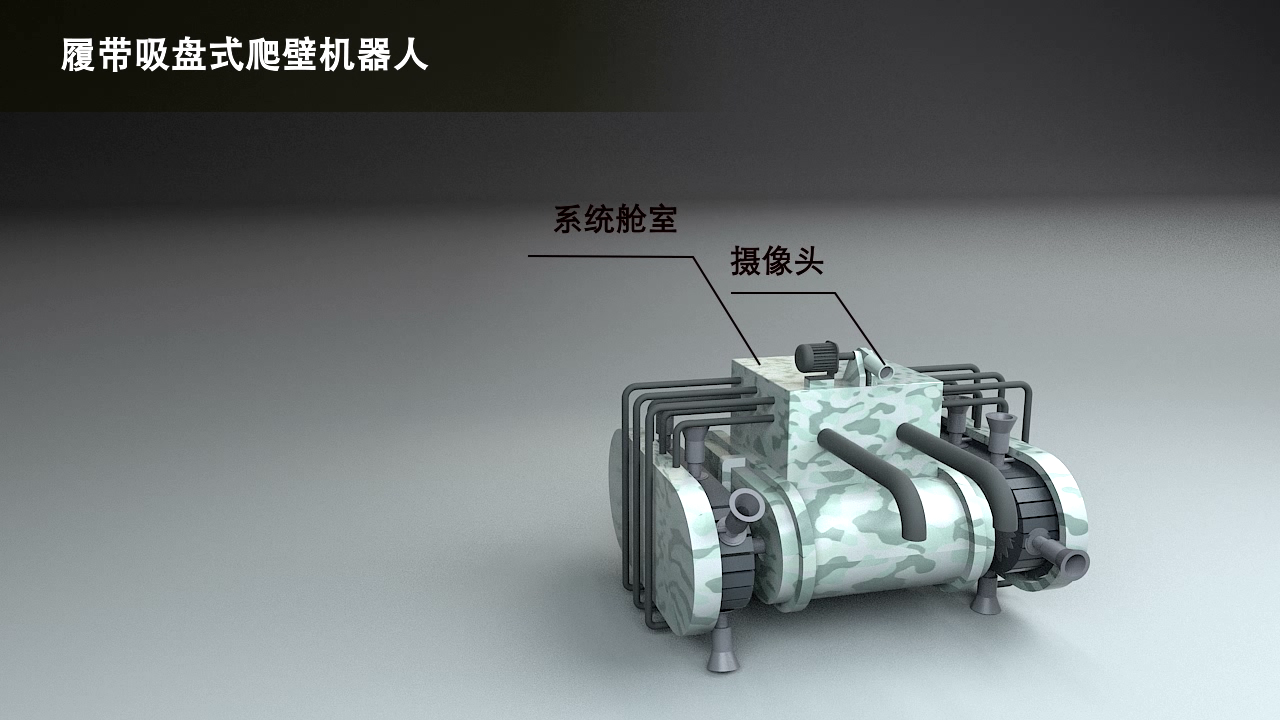
爬壁机器人
集萃智造仿生爬壁机器人,通过多源信息感知与融合技术的智能化手段解决“长距离、多接缝、受限空间”条件下长大隧道的安全监测难题,以实现隧道监测的“全覆盖、全天候、全掌握”,保障隧道安全运营。
了解更多
展商
介绍
江苏集萃智能制造技术研究所有限公司
集萃智造成立于2016年,由骆敏舟核心团队领衔、江苏省产业研究院和南京江北新区三方共同组建,是国家高新技术企业、江苏省民营科技型企业、江苏省智能机器人创新中心、智能机器人工程研究中心,连续多年获南京市新研机构绩效优胜奖。作为智能机器人及解决方案提供商,我们在智能制造整厂规划,以及智能服务与特种机器人研发、销售、生产和产业化上积累了丰富经验,在创新产品研发、关键技术突破、核心部件研制方面极具竞争力。
访问官网
企业宣传册
主办单位
北京市人民政府
中华人民共和国工业和信息化部
中国科学技术协会
承办单位
中国电子学会
北京市经济和信息化局
北京经济技术开发区管委会
获取有关世界机器人大会的最新动态
请扫描左侧二维码关注大会官方微信
中国电子学会 © 2015-2023 All rights reserved
备案号:京ICP备12041980号-10

 江苏集萃智能制造技术研究所有限公司
展位号:A201
江苏集萃智能制造技术研究所有限公司
展位号:A201


 获取有关世界机器人大会的最新动态
请扫描左侧二维码关注大会官方微信
获取有关世界机器人大会的最新动态
请扫描左侧二维码关注大会官方微信