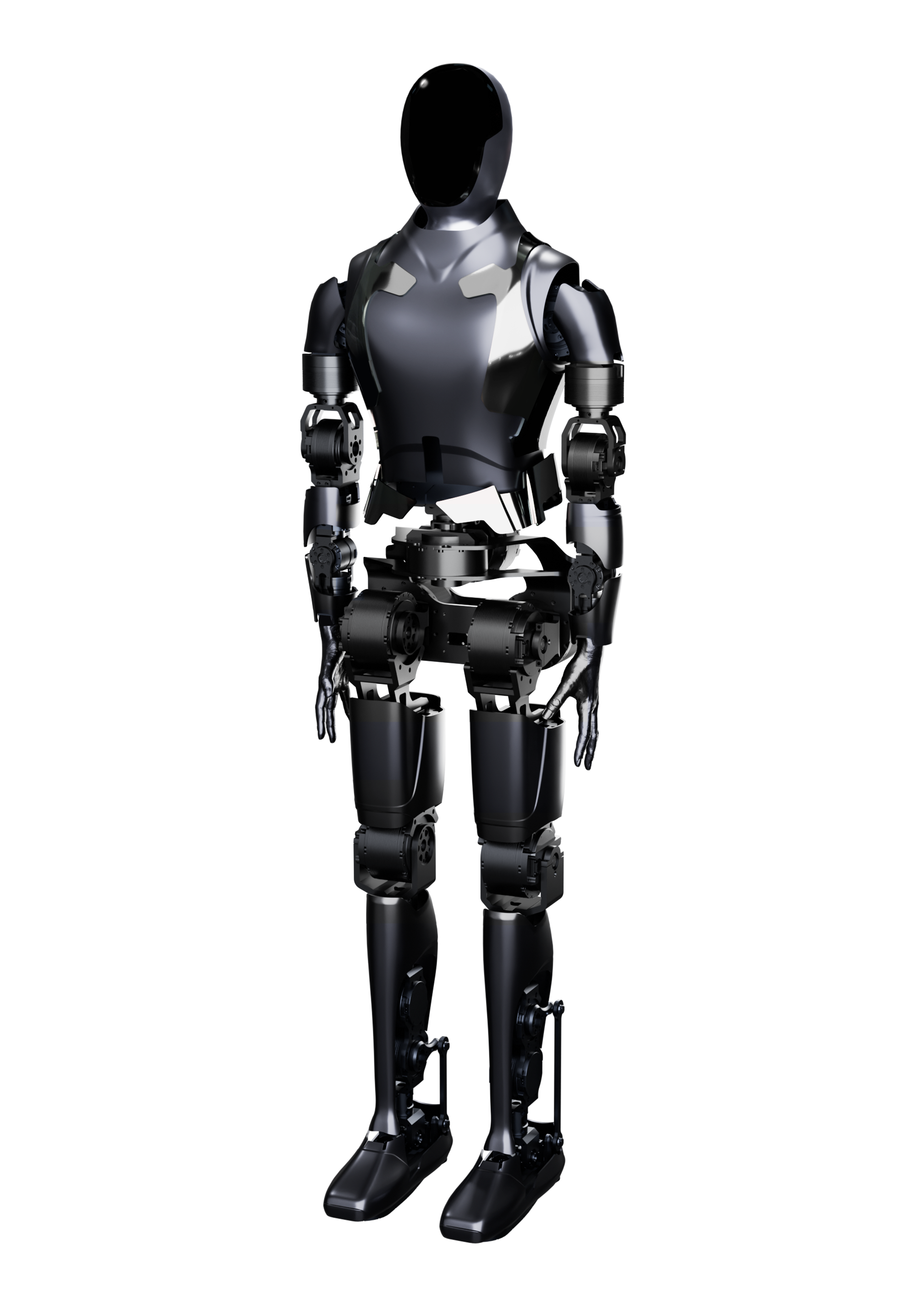
YMbot-F 型工业双足人形机器人采用全力控关节,本体自由度不少于 40个。末端执行器是仿人五指灵巧手,具有高精度定位和创新设计,可实现精准抓取。通信接口支持二次开发,与 ROS2 协议兼容,提供高层和底层丰富接口。该机器人支持产学研合作的外观定制与加装,还能够集成环境感知交互、运动控制、智能决策等模块功能以及大语言模型,从而实现自然语言交互。