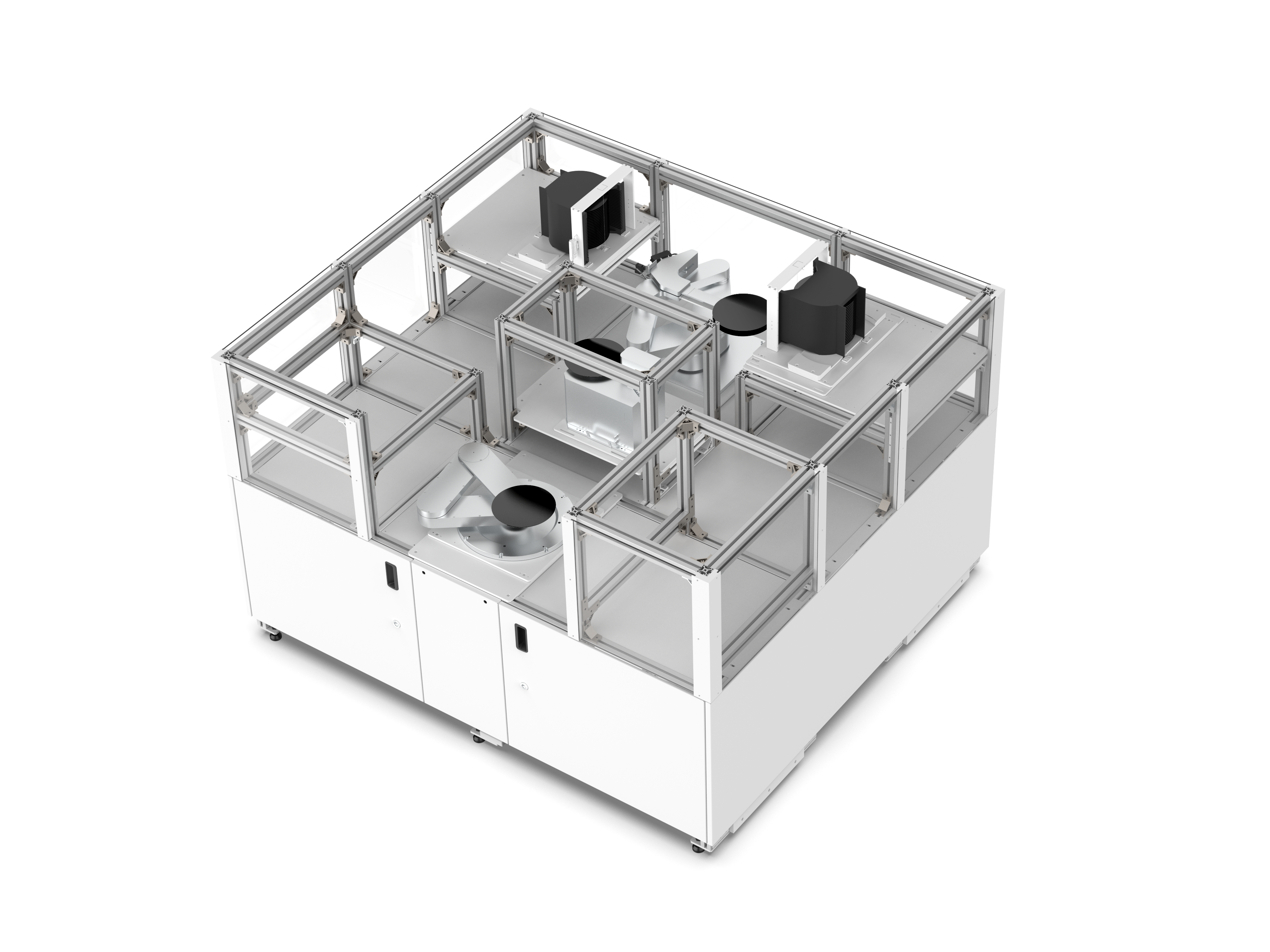
大气晶圆传输机器人采用双臂式机械结构设计,全轴由伺服电机精准控制。在高速运行时,能够凭借先进的自研运动学和动力学算法,保持晶圆的高精度传输。采用插补控制算法实现VIA功能,可灵活应对复杂传输任务;真空晶圆传输机器人采用直驱电机进行闭环控制,结合自研轨迹路径算法,确保晶圆的高平稳传输。搭载自动纠偏功能,可实时检测并纠正晶圆偏差,为半导体制造提供高效、可靠的传输解决方案。