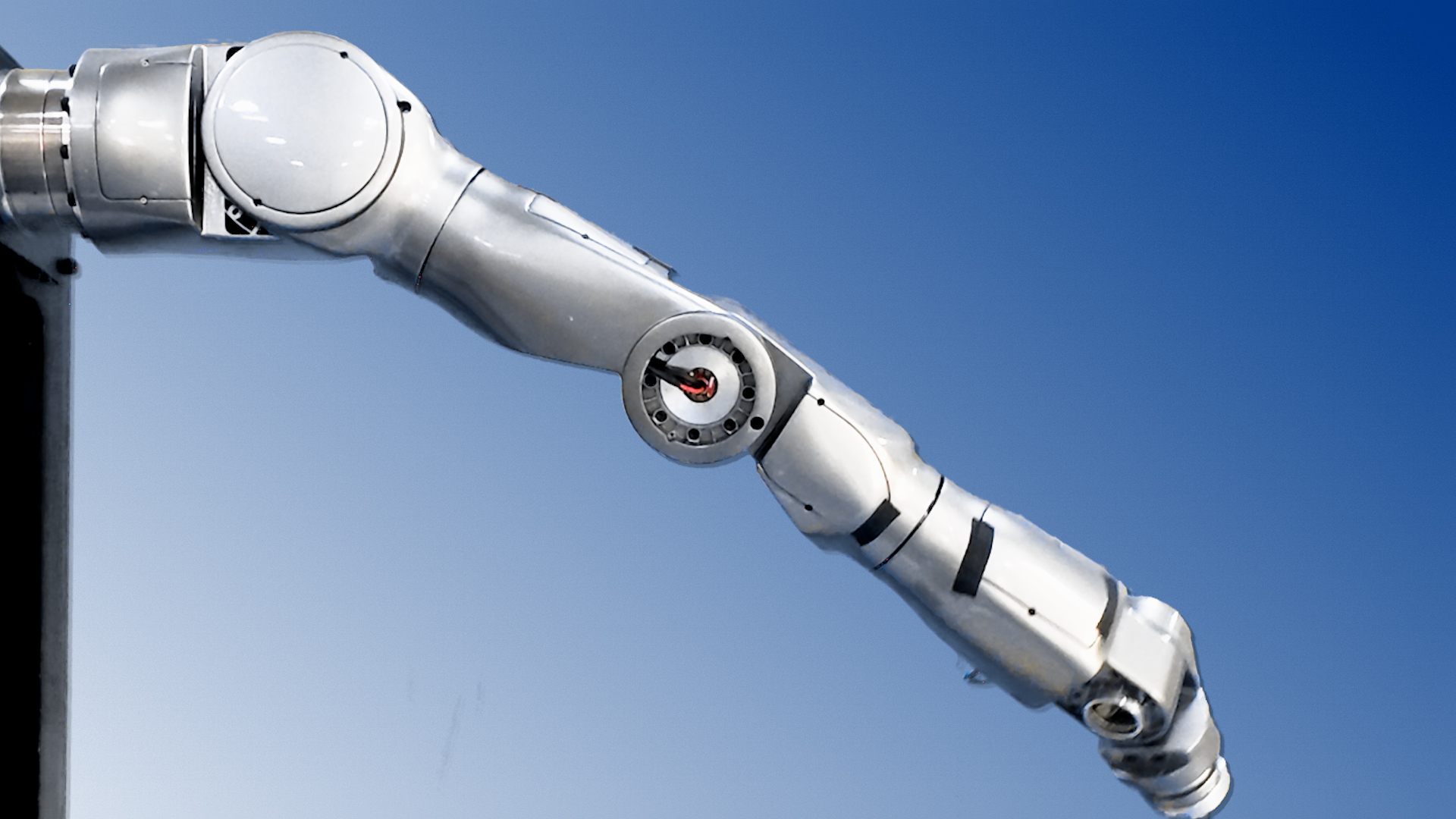
人形机械臂覆盖多档负载规格,具备卓越的模块化架构与软硬件开放接口,全面支持二次开发与深度定制。 其结构设计高度仿生,深度融合人体工学与生物力学原理,在运动自由度、关节排列及力控反馈等方面精准复现人类上肢行为模式。 可实现高精度、高响应的人形操作体验。其开放性与可拓展性,为构建多场景、多模态的人形机器人系统奠定坚实本体基础。