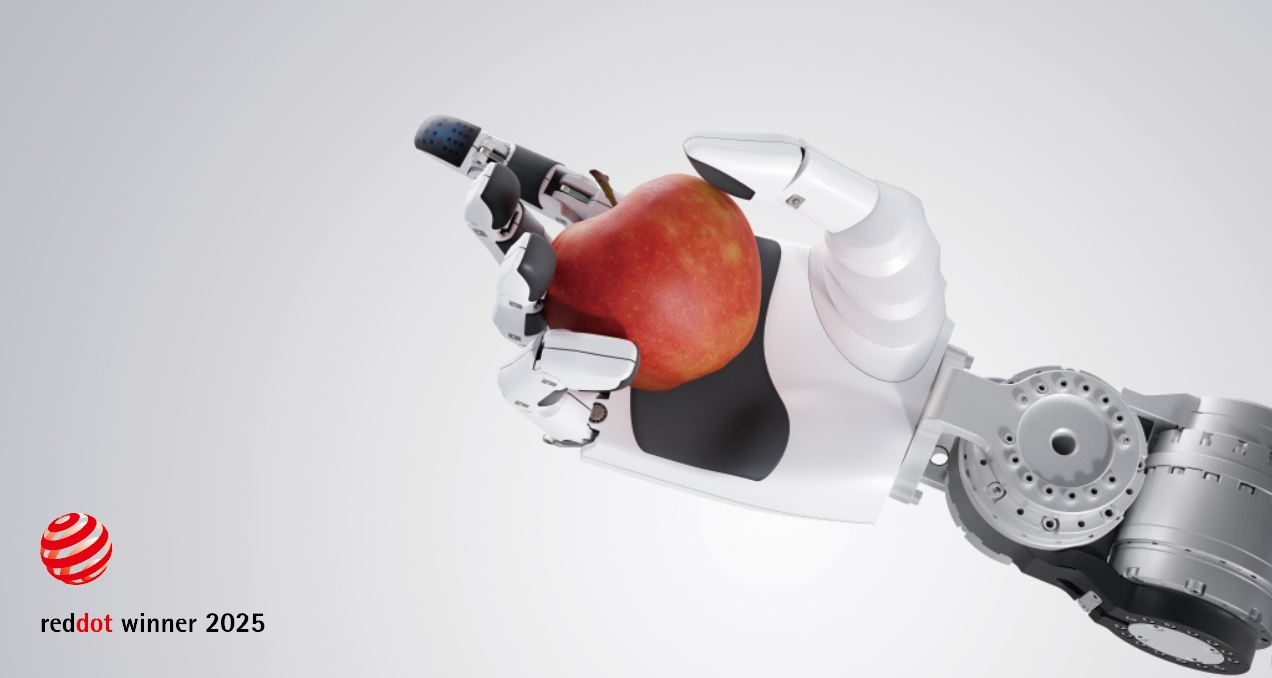
灵巧手系列提供高/低自由度两种解决方案,满足差异化抓取需求。其大小及外观均与人手类似,并且每个手指以及一体式的电机模块可做为独立模块进行组装、调试和维护。同时具备反驱、 高自由度灵巧手采用全仿生人手的关节屈曲结构驱动,同时针对当前行业痛点设计了指尖按压维持的结构,使得指尖按压物体表面不再依靠电机堵转来实现,增强了电机的寿命和系统的可靠性。