-
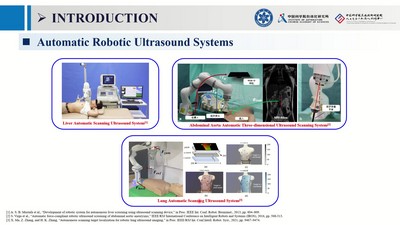
Towards Autonomous Robotic Ultrasound Scanning Using the Reinforcement Learning-Based Volumetric Data Navigation Method
Shen, Cuifeng/Deng, Zhaokun/Wang, Jinzhi/Wang, Shuangyi/Chen, Chen
-
Towards Automated Ultrasound Scanning Using Vision-Based Navigation: From Physician Skill Learning to Robotic Reproduction
Hao, Mingrui/Zhang, Pengcheng/Chen, Chen/Wang, Shuangyi
-
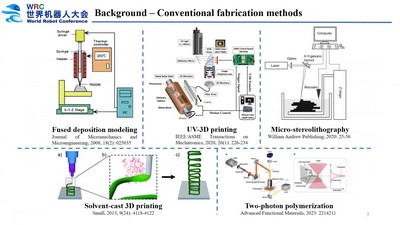
High Precise Metallic Helical Microstructure Fabrication by Rotational Nanorobotic Manipulation System with Tilted Mandrel Compensation
Zhang, Tieshan/Ren, Hao/Li, Gen/Guo, Dong/Shang, Wanfeng/Shen, Yajing
-
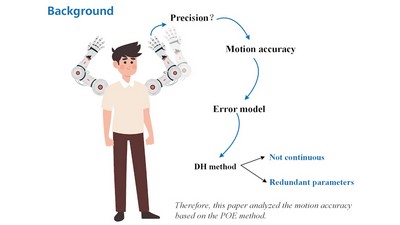
Research on Absolute Positioning Error Compensation of Serial 6-DOF Industrial Robot
Cui, Rongyue/Jun, Wei/Liang, Liang
-
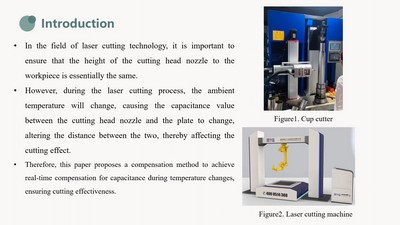
Research on Capacitance Compensation for Temperature Changes in Laser Cutting Systems
Hu, Jingru/Jun, Wei/Luan, Xianye/Gong, Fei
-
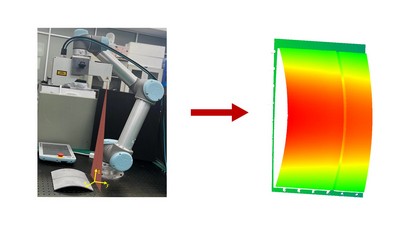
Aircraft Skin Seam Location and Step Difference Measurement Based on 3D Point Cloud
Yu, Haiwen/Chen, Bai/Duan, Jinjun/Ding, Liping
-
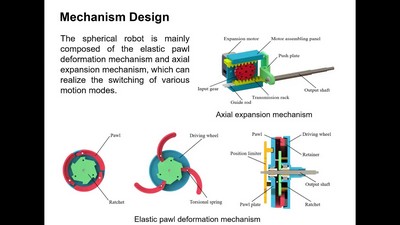
Design and implementation of a new spherical robot with an elastic pawl
Fang, Shihao/Qin, Jianjun/Cao, Yu/Shao, Pai
-
A Bionic Mimosa Soft Robot Composed by PNIPAM-PEGDA Copolymer
Wang, Xiaowen/Yang, Wenguang/Ge, Zhixing
-
Development and Kinematic Accuracy Analysis of Supernumerary Robotic Limbs
Liao, Ziyu//Chen, Bai/Zheng, Qian/Xu, Jiajun/Tu, Zhendong/Wu, Hongtao